The history of all planets lies underground: what geological processes shape its surface; the composition of its atmosphere over the aeons; the effect the sun’s radiation has had; even whether or not it has ever supported life. Of course, getting to other planets is a monumental task; landing on them, even more so. Drilling into their surfaces to get to the history hidden beneath? It’s so difficult that it’s never been done, at least not without human intervention.
The only planetary body where sub-surface rock samples have been collected is the moon and that was only because NASA went to the trouble of sending astronauts there with geological equipment. But plans to drill on the surface of Mars later this decade, and in later missions to the solid moons of Jupiter and Saturn, will not have the advantage of heavy equipment and hands-on operation. For these missions, there’s no option other than robotic exploration.
A UK team is currently working on this problem by creating a drill that’s very different from the ones that are familiar from terrestrial applications. Rather than spinning around an axis to screw a drillbit into the ground, it works by using ultrasonics to hammer on the rock and break it away below the bit.
The project is a collaboration between Leicestershire-based technology developer Magna Parva and a team from the mechanical engineering department of Glasgow University, led by Dr Patrick Harkness. At recent field trials involving EADS Astrium’s Mars rover platform in Tenerife, Harkness explained to The Engineer that rotating drills are not best suited to planetary investigation.
There are two particular problems with rotating drills, he said: overcoming the rotation force and pushing the drill into the ground. ’One problem is the rotation inside the hole; the drillbit and shaft experience friction as they rub against the side of the hole,’ he said. The friction loads on a conventional rotating drill can soak up 80 per cent of the power that’s turning the bit. ’That means that the rover body itself has to overcome the torque, or the drill will stay still and the rover will spin around; obviously we don’t want that.
’The other problem is pre-loading; you have to apply a downward force on the drillbit and, especially as you’re operating in low gravity, it’s hard to imagine how you’re going to apply that force with a rover that you’ve made as light as possible. If the rover is on uncertain ground, you simply can’t get the push to get the drill into the ground.’
The ultrasonic drill works very differently. Rather than cutting through the rock like a conventional bit, it works by pulverising the rock by hammering on it with a small, specially shaped cutting bit. ’This can penetrate sedimentary rocks such as sandstone - which are the sort of rocks you’re going to want to drill into on Mars because they’re the ones most likely to contain signs of past life - with a preload of 6-8N, which is a fraction of what you’d need with a rotating drill.
The drill that the Glasgow team has developed works on a principle called high-frequency, low-frequency transformation. ’At the top of the drill assembly, there’s a traditional ultrasonic horn that vibrates at very high frequency - about 20,000 cycles per second.’ Harkness said. ’Underneath that is a free mass, a ball bearing, and underneath that is a cutting bit.’

Although the horn vibrates at high frequency, its amplitude - the distance it travels up and down - is short, which means that the amount of energy associated with each up-and-down cycle is small. As the horn travels downwards, it hits the ball bearing, drives it into the ground and rebounds up to the horn. ’But the interesting thing is that while this process has been going on, the ultrasonic horn has been building up to its full amplitude again,’ Harkness said. ’So next time the free mass makes contact with the ultrasonic horn, it’s in a position to take out not just one cycle of energy, but all the energy the electronics have put into the horn while it’s in transit. This in turn means that, when the cutting bit makes contact with the rock, it delivers an impulse that is above the compressive strength of the rock.’
Removing rotating equipment from the picture also simplifies the mechanism significantly, eliminating the need for equipment such as clutches and heavy motors, which must be lubricated and protected from the harsh, dusty environments found on planetary bodies out in the solar system.
The drill bolted onto the rover for the field trial was a bulky piece of equipment measuring nearly 1m in height. ’Most of that isn’t the drill,’ Harkness said. ’It’s the motors and equipment needed to lower the drill onto the rock. But the drill itself is also oversized, because we are using a standard ultrasonic transducer that’s designed to operate at a variety of frequencies, whereas we only need one.’
This approach is standard for developing space technology, explained field-trial director Lester Waugh of EADS Astrium. ’There’s an optimum size for trial equipment when you’re trying to prove a concept that is actually to do with cost,’ he said. ’If you make it too big, it’ll cost too much because you’ll be using too much material. If you make it too small, you increase the cost because you have to work on miniaturisation. That’s an issue when you’re designing the device for the probe itself, but for trials you just need something that works. So we take the easy way out, initially, so we can iron out all the problems with the concept and the mechanism and then start miniaturising.’
For Harkness’s team, this is where the collaboration with Magna Parva, which has experience with producing devices to go into space, comes in. ’At the end of this part of the project, we’re going to integrate the drill section of the hardware with Magna Parva’s ultrasonic transducers. Those are much smaller than the commercial version we’re using here, which adds about 45cm to the height of the stack. If we can marry the frequency-transforming assembly and drillbit to the Magna Parva transducer they are designing for this application, we’ll have a much more compact and efficient drill tool.’
This drill will be particularly suited to removing core samples, Harkness believes. Although - for shallow core samples - conventional drilling is more efficient for this application, the deeper the drill goes, the more suitable ultrasonic drilling becomes because of the absence of down-hole friction. The drill only needs to operate around the edge of the hole, because the central section needs to be kept undamaged, which concentrates the impulse energy of the drillbit into a narrow ring. The team is designing shaped drillbits for this purpose.
EADS Astrium is working to make the Glasgow University team aware of the constraints that the rover test vehicle will encounter in spaceWhile the drillbit can - and has - been tested in isolation, a field trial with the system integrated into the rover test vehicle is invaluable, Lester Waugh explained. ’We do a lot of system engineering for the Glasgow team,’ he said. ’They need that, because when you go into space there are a lot of things you can and can’t do.’
Any equipment designed for a planetary mission needs to be able to cope with vacuum and with any atmosphere on the body it is going to investigate; it needs to handle the extreme vibrations of launch and the shock of landing; and it has to do all of that while still maintaining its integration with all the systems on board the rover. ’There are also considerations such as power consumptions. They need to understand the constraints and issues, and we make them aware of those.’The history of all planets lies underground: what geological processes shape its surface; the composition of its atmosphere over the aeons; the effect the sun’s radiation has had; even whether or not it has ever supported life. Of course, getting to other planets is a monumental task; landing on them, even more so. Drilling into their surfaces to get to the history hidden beneath? It’s so difficult that it’s never been done, at least not without human intervention.
The only planetary body where sub-surface rock samples have been collected is the moon and that was only because NASA went to the trouble of sending astronauts there with geological equipment. But plans to drill on the surface of Mars later this decade, and in later missions to the solid moons of Jupiter and Saturn, will not have the advantage of heavy equipment and hands-on operation. For these missions, there’s no option other than robotic exploration.
Drilling to find the history hidden beneath? It’s so difficult it’s never been done before - not without human intervention
A UK team is currently working on this problem by creating a drill that’s very different from the ones that are familiar from terrestrial applications. Rather than spinning around an axis to screw a drillbit into the ground, it works by using ultrasonics to hammer on the rock and break it away below the bit.
The project is a collaboration between Leicestershire-based technology developer Magna Parva and a team from the mechanical engineering department of Glasgow University, led by Dr Patrick Harkness. At recent field trials involving EADS Astrium’s Mars rover platform in Tenerife, Harkness explained to The Engineer that rotating drills are not best suited to planetary investigation.
There are two particular problems with rotating drills, he said: overcoming the rotation force and pushing the drill into the ground. ’One problem is the rotation inside the hole; the drillbit and shaft experience friction as they rub against the side of the hole,’ he said. The friction loads on a conventional rotating drill can soak up 80 per cent of the power that’s turning the bit. ’That means that the rover body itself has to overcome the torque, or the drill will stay still and the rover will spin around; obviously we don’t want that.
’The other problem is pre-loading; you have to apply a downward force on the drillbit and, especially as you’re operating in low gravity, it’s hard to imagine how you’re going to apply that force with a rover that you’ve made as light as possible. If the rover is on uncertain ground, you simply can’t get the push to get the drill into the ground.’
The ultrasonic drill works very differently. Rather than cutting through the rock like a conventional bit, it works by pulverising the rock by hammering on it with a small, specially shaped cutting bit. ’This can penetrate sedimentary rocks such as sandstone - which are the sort of rocks you’re going to want to drill into on Mars because they’re the ones most likely to contain signs of past life - with a preload of 6-8N, which is a fraction of what you’d need with a rotating drill.
The drill that the Glasgow team has developed works on a principle called high-frequency, low-frequency transformation. ’At the top of the drill assembly, there’s a traditional ultrasonic horn that vibrates at very high frequency - about 20,000 cycles per second.’ Harkness said. ’Underneath that is a free mass, a ball bearing, and underneath that is a cutting bit.’
Although the horn vibrates at high frequency, its amplitude - the distance it travels up and down - is short, which means that the amount of energy associated with each up-and-down cycle is small. As the horn travels downwards, it hits the ball bearing, drives it into the ground and rebounds up to the horn. ’But the interesting thing is that while this process has been going on, the ultrasonic horn has been building up to its full amplitude again,’ Harkness said. ’So next time the free mass makes contact with the ultrasonic horn, it’s in a position to take out not just one cycle of energy, but all the energy the electronics have put into the horn while it’s in transit. This in turn means that, when the cutting bit makes contact with the rock, it delivers an impulse that is above the compressive strength of the rock.’
Removing rotating equipment from the picture also simplifies the mechanism significantly, eliminating the need for equipment such as clutches and heavy motors, which must be lubricated and protected from the harsh, dusty environments found on planetary bodies out in the solar system.
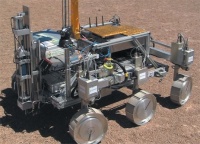
The drill bolted onto the rover for the field trial was a bulky piece of equipment measuring nearly 1m in height. ’Most of that isn’t the drill,’ Harkness said. ’It’s the motors and equipment needed to lower the drill onto the rock. But the drill itself is also oversized, because we are using a standard ultrasonic transducer that’s designed to operate at a variety of frequencies, whereas we only need one.’
“We iron out problems with the concept and the mechanism, then start miniaturising”
LESTER WAUGH, EADS ASTRIUM
This approach is standard for developing space technology, explained field-trial director Lester Waugh of EADS Astrium. ’There’s an optimum size for trial equipment when you’re trying to prove a concept that is actually to do with cost,’ he said. ’If you make it too big, it’ll cost too much because you’ll be using too much material. If you make it too small, you increase the cost because you have to work on miniaturisation. That’s an issue when you’re designing the device for the probe itself, but for trials you just need something that works. So we take the easy way out, initially, so we can iron out all the problems with the concept and the mechanism and then start miniaturising.’
For Harkness’s team, this is where the collaboration with Magna Parva, which has experience with producing devices to go into space, comes in. ’At the end of this part of the project, we’re going to integrate the drill section of the hardware with Magna Parva’s ultrasonic transducers. Those are much smaller than the commercial version we’re using here, which adds about 45cm to the height of the stack. If we can marry the frequency-transforming assembly and drillbit to the Magna Parva transducer they are designing for this application, we’ll have a much more compact and efficient drill tool.’
Indepth
EADS Astrium is working to make the Glasgow University team aware of the constraints that the rover test vehicle will encounter in space
While the drillbit can - and has - been tested in isolation, a field trial with the system integrated into the rover test vehicle is invaluable, Lester Waugh explained. ’We do a lot of system engineering for the Glasgow team,’ he said. ’They need that, because when you go into space there are a lot of things you can and can’t do.’
Any equipment designed for a planetary mission needs to be able to cope with vacuum and with any atmosphere on the body it is going to investigate; it needs to handle the extreme vibrations of launch and the shock of landing; and it has to do all of that while still maintaining its integration with all the systems on board the rover. ’There are also considerations such as power consumptions. They need to understand the constraints and issues, and we make them aware of those.’



Swiss geoengineering start-up targets methane removal
No mention whatsoever about the effect of increased methane levels/iron chloride in the ocean on the pH and chemical properties of the ocean - are we...