
According to its developers, the concept is the first to show realistic insect-like characteristics at this scale and could pave the way for smaller and more robust designs.
Currently, microscale robots are largely formed from complex moving parts that are subject to wear from friction and jamming as a result of dust particles.
‘The complex moving parts ultimately limit their lifetime and confine their use to a controlled laboratory environment,’ said Jason Clark, an assistant professor of electrical, computer and mechanical engineering at Purdue University.
Clark has developed a concept using a solid-state muscle for microid legs and mandibles that allows the robots to move over environments such as sand or water.
This is done using a ‘tripod gait’ for walking - a technique used by most insects that enables them to remain stable over uneven terrain.
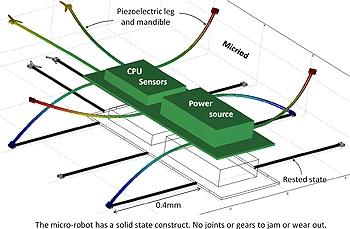
‘Because the microids are solid state without any discrete parts such as gears that wear due to frictional contact, they are likely to be long lasting and robust. If a microid were stepped on, it would probably just get up and walk away,’ said Clark.
Each leg comprises a bundled triad of slender beams made of piezoelectric material, which generates electricity when compressed. This could allow them to have the ability to ‘scavenge vibrational energy’ from the environment to recharge their power supply. There is also the possibility of hordes of microids working in unison and communicating with each other to perform a complex task.
Clark said: ‘The microids would be able to walk, run and jump, plus pick up and move objects many times their own weight. A microid can also do what no insect or other microrobot can do, which is continue walking if flipped on its back. Who knows, maybe flight is next.’
‘You can’t underestimate the power of having thousands of microids working together, much like ant colonies,’ he added.
Currently, the researchers are working on fabricating a simplified proof of concept of a microid at the Birck Nanotechnology Center in the university’s Discovery Park. Purdue has also filed a patent application on the concept and hopes that in the future the system can be mass produced.



Swiss geoengineering start-up targets methane removal
No mention whatsoever about the effect of increased methane levels/iron chloride in the ocean on the pH and chemical properties of the ocean - are we...