Of all the areas where engineering and technology is affecting medicine, surgery is probably the one where it has the potential to make the biggest changes. New imaging techniques and improved instruments help surgeons to identify the regions where they must operate and assist their intricate work.
Robot surgeons, although poorly named, are at the forefront of one of the biggest technology-led changes. Rather than carrying out surgery without human intervention, as the name implies, they are remotely operated devices that allow surgeons to work through small incisions, rather than the large holes needed in conventional surgery for surgeons to see what they are doing. This reduces the size of wounds and therefore scarring, and reduces the time needed for recovery.
One particularly striking form of remote surgery promises the possibility of doing away with scars altogether. Known as NOTES (Natural Orifice Transluminal Endoscopic Surgery), the technique takes advantage of the holes that are already in the body as access points for surgery. Rather than making an incision in the outside of the body, the surgeon goes in via the mouth, rectum or vagina, makes an incision through the wall of the orifice (this is the ’transluminal’ part of the acronym) and then burrows through to reach the target organ. The result is no visible scar and no incision-related complications.
“Pliability is essential to protect the delicate internals of the body upon insertion”
TIM FRANCOIS, OC ROBOTICS
But there’s no way this can be done without robotic assistance. While endoscopes are now commonly used to see inside the body via natural orifices, they don’t have the mobility necessary to navigate as precisely as NOTES requires, and their mechanical structure, although fine for mounting a passive camera on to, isn’t suitable as a mount for surgical instruments; these need to be mounted on a firm platform, which doesn’t move when the instruments press against or cut into tissues.
The first NOTES procedures were carried out in 2007 and the technique has been developed around the world, with appendixes, kidneys and gallbladders being removed. To date, NOTES operations have used conventional, although adapted, endoscopes, and have had some success: in the UK, the technique has been used for gallbladder surgery on female patients. However, to develop the technique further, dedicated instruments are needed; in particular, the robot that takes the instruments inside the body.
Two UK teams are currently working on robots for NOTES. At Imperial College London, a team from the departments of surgery, computing and biomedical engineering, funded by the Wellcome Trust, is working on iSnake, a combined surgical robot and imaging device. Meanwhile, Bristol-based OC Robotics is developing its snake-arm robots, which are used as remote manipulators in hazardous areas, to work within the human body, aided by a grant from the Technology Strategy Board.
Neither machine is, in any way, a ’robot surgeon’. They are hollow tubes into which surgeons can insert surgical tools to perform surgery. However, they form a vital, automated link to the outside world, providing the surgical team with access to their target organs from inside the body and forming a shield to protect the tissues through which they pass from damage.
’iSnake stands for “imaging sensor navigated and kinematically enhanced”,’ explained Prof Guang-Hong Yang of the mechatronics laboratory of Imperial College’s Hamlyn Centre. ’We use imaging and sensing so that it can view the tissue it’s touching and can see where it’s going.’
The device is a self-propelled articulated robot, about a centimetre wide and from 20-60cm long, depending on the operation it is used for. Its control system allows the operator to manipulate all of its joints simultaneously, taking the instrument-carrying head of the robot where it needs to go without having to worry about the rest of the robot behind it. ’We don’t want to make the whole thing automatic,’ said medical robotics engineer Valentina Vitellio.
’However, while the surgeon is carrying out the procedure, we need to make sure that the rest of the articulated body is not causing tissue damage.’
To do this, the robot has a pre-set ’limited workspace’ - an area within which it can work safely, but cannot move outside. This can be reset during the operation, to guide its movements and control the amount of force it can exert on the tissues it is touching.
The iSnake team, with its sensor-equipped, custom-designed robot, believes it can develop systems capable of carrying out complex multi-chamber coronary bypass operations and exploring the nooks and crannies of the alimentary system.
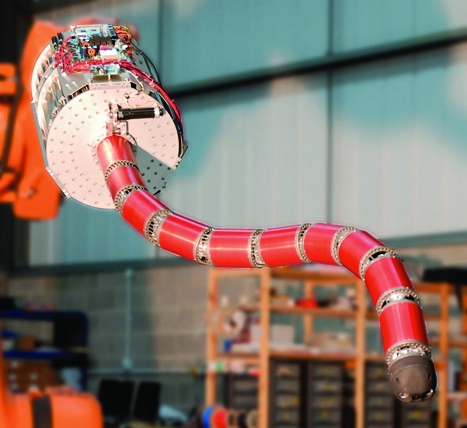
For OC Robotics, remote operation using a flexible tubular robot is its bread and butter: it has 10 years of experience in designing snake-arm robots for hazardous environments. But however constrained and dangerous, the designed, engineered, hard-surfaced environment of a nuclear power reactor is very different from the squishy, constantly collapsing and perilously delicate interior of the human body.
The robot has a pre-set ’limited workspace’ - an area within which it can work safely, but cannot move outside
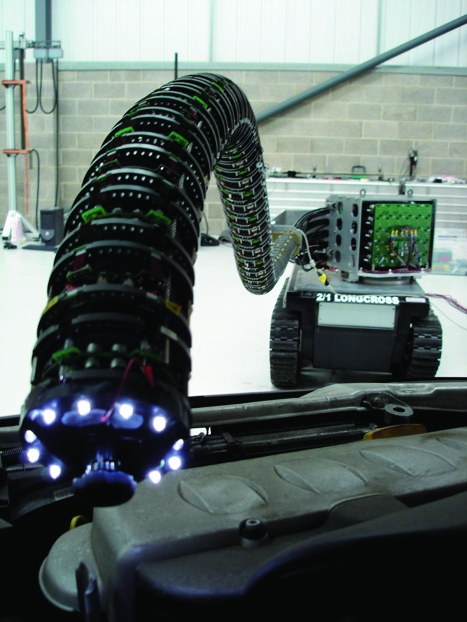
The robot that OC Robotics is developing uses identical technology to its existing snake-arm robots: the links along its flexible body are cable-actuated, with all the motors and electronics located outside the arm. This allows it to work in two modes: flexible, for insertion, but stiff and steerable, so that the surgeon has a stable platform from which to work once the snake’s head has reached its target. ’Pliability is essential to protect the delicate internals of the body upon insertion, but rigidity is required to react to forces at the tip,’ explained Tim Francois of OC Robotics. ’The control we have over the snake-arm also means that we can do 180º bends, enabling us to navigate or reach a range of sites inside the abdominal cavity.’
OC has also developed a simulated human-body environment, for virtual operation of a simulated snake arm. It is developing the technology so that internal organs from virtually anywhere within the body can be removed via the mouth; currently, the technique is used most often transvaginally, but obviously this is only suitable for half of the potential patients.
For OC Robotics chief Rob Buckingham, the development is at a very early stage. ’Surgery is perhaps the largest market for robots that can operate in confined spaces, and probably the most complex; that is, it needs consensus and development,’ he told The Engineer.
However, he believes that OC’s experience in the area gives the company a head start. ’What the surgeons need is adequately mature technology in order to collect data and make the case for the technique, based on patient outcomes and cost savings.’
Snake-shaped robots may be new, but the technique they’re using is not
NOTES is a branch of minimally invasive surgery, a technique that has now been used for more than a century, albeit initially only on animals. However, its development was greatly accelerated by the development of microchip-equipped television cameras, which allow surgeons a magnified view of their surgical field.
1902 Georg Kelling of Dresden performs the first laparoscopic surgery, on a dog
1910 Hans Christian Jacobeus claims to have performed the first laparoscopic surgery on a human
1950s First published studies of laparoscopy on humans
1981 First laparoscopic appendectomy
1985 First robotic laparoscopy, with a robot placing a needle for brain biopsy
1988 Imperial College develops Probot for prostate surgery
2000 Introduction of the Da Vinci robot surgeon
2007 First NOTES surgery - gallbladder removal
Nanogenerator consumes CO2 to generate electricity
Whoopee, they've solved how to keep a light on but not a lot else.