As a keen gardener with a hatred of slugs, my grandfather would have loved the idea of a robot that captures the pests, digests them and uses the resulting energy to catch more.
Unfortunately, he didn’t quite live to see it. And, in any case, the prototype - made by researchers at Bristol Robotics Lab (BRL) in 2000 - didn’t quite work. Its detector/grabber arm could find and capture the slugs fine, but the micro-combustor and methane fuel cell was never going to generate enough energy to let it work autonomously. Nevertheless, it set them on a path to arguably some of the most interesting work in robotics research today.
Giving a public lecture at the TAROS robotics conference in Sheffield last month, Prof Alan Winfield of BRL asserted that if you ’ask any researcher in the field today what the most pressing challenge is in robotics, most would say it’s energy autonomy’. Winfield went on to say that colleagues of his at BRL were leading the world in this regard. Compelled to verify these claims, The Engineer headed to Bristol.
The ’lab’ is actually more of a hangar, originally intended as a factory before being leased to Bristol University and the University of the West of England for the collaborative BRL. However, it’s perfectly suited to the ethos of the BRL, which is all about building and testing robots from scratch where possible, rather than just designing bespoke software to slot into existing platforms. The upshot is that BRL researchers have to be well versed in engineering, electronics and even biochemistry in the case of Dr Ioannis Ieropoulos, who heads the energy autonomy group.
’Until recently, people in the field were more concerned with computational autonomy, so making decisions in a dynamic environment. But unless it takes into account the energy collection, distribution and management on board, then it’s not true autonomy,’ he said. It could be argued that robots such as the Mars rover vehicles have achieved some degree of energy autonomy using photovoltaics and batteries. But, as well as the obvious drawback of not being able to work underground or underwater, they’re actually quite limited. The Mars rover Opportunity recently passed the 30km milestone, having travelled more than 50 times its designated distance since its landing in 2004. Meanwhile, the crew of Apollo 17 covered more than 34km during their three days on the surface of the moon. Furthermore, as Ieropoulos pointed out, in nature it’s the static plants that use solar energy, whereas the more mobile and robust animals use organic sources within their own environment.
’Slugbot’ was the group’s first attempt to equip a robot with a metabolic energy system and, although an interesting diversion, was ultimately unsuccessful. In fact, the whole autonomous energy project might have been dropped had it not been for one of the team reading a paper about the relatively new technology of microbial fuel cells (MFCs). These perform much like regular fuel cells, but generally have an anode containing bacteria that consume an organic material to instigate a current (see box).
The team adapted and fitted a stack of these MFCs to a small ’cake-shaped’ robot with a set of capacitors and two motors driving the wheels. The E.coli-based anode of the MFCs took on board sugar water as fuel injected by the team, while the cathode used a finite supply of ferricyanide as the oxidising agent, closing the circuit. With these sugar hits, the robot performed a simple phototaxis light-tracking task in short, pulse-motion bursts of activity, as Ieropoulos explained.
’We deliberately wanted the robot to run out of energy as it was moving towards the light, so it would stay idle for a specific amount of time and regenerate the energy through the metabolism of bacteria, accumulate it into the capacitor bank, wake up and continue executing the task, then go back to sleep, wake up and so on.
’For the first time, for a robot such as this, it’s good to be doing nothing, because when it’s doing nothing it’s accumulating the energy it needs to continue the mission.’
“It was the first robot in the world to do this actuation, communication, processing and sensing from biomass – from flies”
Thus EcoBot-I made its mark. It wasn’t really autonomous and eventually poisoned itself with its own by-products. But it showed the early potential of MFCs.
The team set to work quickly on its successor. The first modification was to include a wider community of bacteria in the anode, chosen in such a way that the by-products of one species were the food for another species. This meant EcoBot-II had a broader diet and was more efficient.
’The stack is more powerful in the sense that [the MFCs] are kicking out more electrons - it’s giving you more energy for the same volume and electrosurface area,’ Ieropoulos said. In fact, the anode was so powerful that the team found it could forgo the chemical cathode of the MFC and open it up to utilise oxygen and a small amount of moisture from the air. The robot was now breathing and drinking.
The team began to feed it various food sources, including rotten fruit, prawn shells and grass clippings. To their surprise, they found it could completely digest the common housefly, Musca domestica, whole without any mechanical ’chewing’, leaving behind only fibrous parts of the wings and legs.
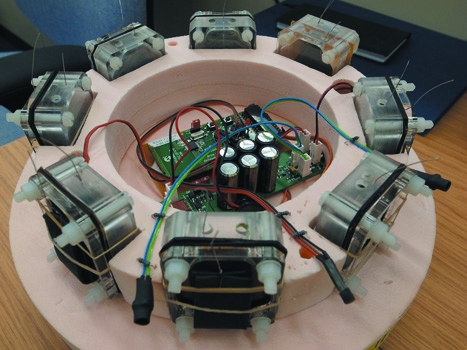
With eight MFC units arranged in a circular formation around the cake body (for maximum exposure to the air), EcoBot-II went for two weeks on just eight flies, one in each MFC hole, using the same pulsed motion as its predecessor. It also wirelessly fed back temperature information about its environment.

’That endurance experiment allowed us to bring closure to the EcoBot-II project by saying we knew the robot could operate autonomously for two weeks. It was the first robot in the world to do this actuation, communication, processing and sensing from biomass - from flies,’ Ieropoulos said.
By this stage in 2005, the work was starting to attract more attention, and the group secured a European Union grant under the Framework Programme 6 (FP-6) scheme. The group now had the opportunity to ramp up the technology a few notches.
Although something of a first, EcoBot-II was rather primitive - it digested extremely slowly and still had no way of getting rid of harmful waste products. That would require something more sophisticated, akin to a proper gut with a pre-digestion phase and excretory function.
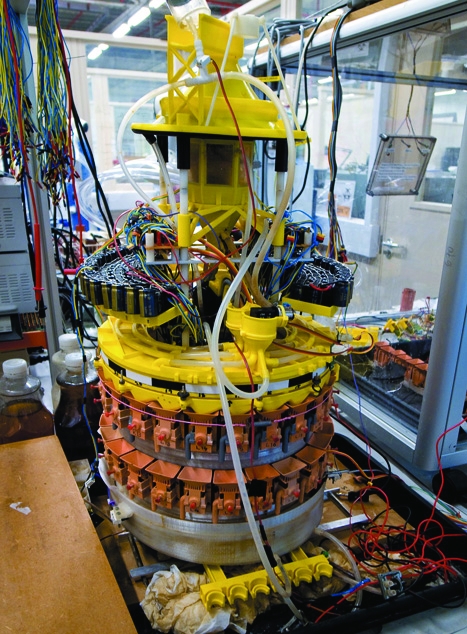
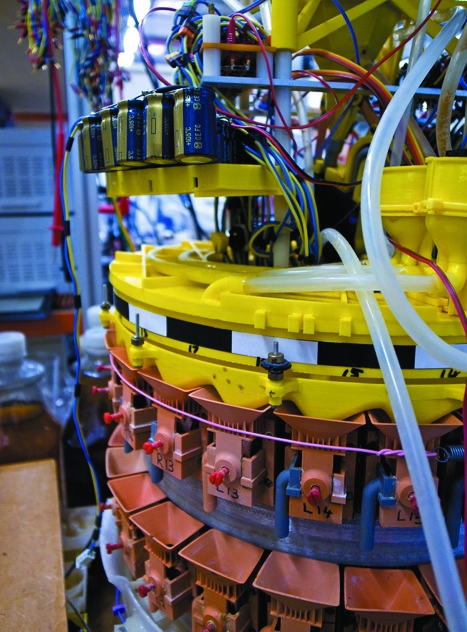
Enter EcoBot-III in late 2010, which is designed to operate on two feeding strategies: one based on flies attracted with pheromones and ultraviolet light and the other based on liquid food sources, such as partially treated sewage. The cathode additionally requires clean water.
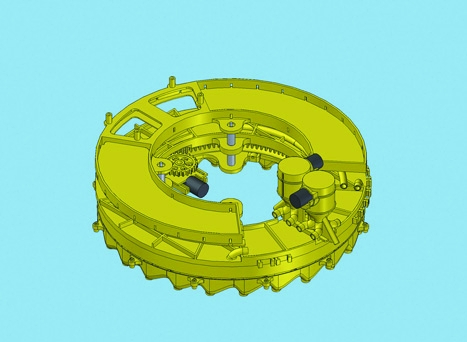
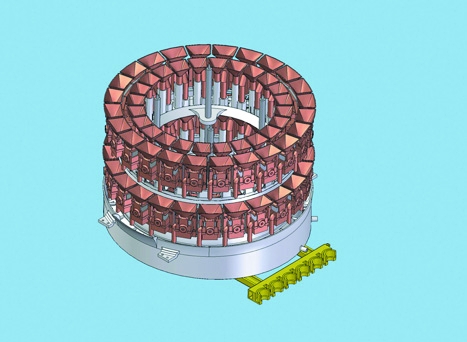
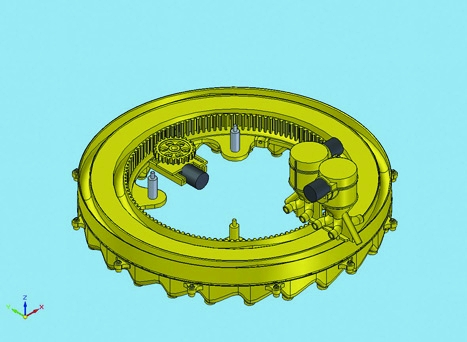
Both food sources are siphoned into an artificial stomach, where they are agitated and digested with enzymes to form a nutrient soup that is more amenable to electrochemical utilisation. This digestate is then mechanically pumped to 48 MFCs arranged in two tiers around the outside of the bin-shaped robot (again, to ’breathe’).
Overflowing liquids from the top tier fall directly into the units on the bottom tier, which in turn overflow to a trough looping back to the header tank, allowing the re-circulation of useful ’waste’. Undigested sediment accumulates inside the digester, which is purged every 24 hours by a peristaltic pump that works like a colon, using pressure waves to expel the waste from the tube into a litter tray.
To test EcoBot-III, the team designed an enclosed thermostatic arena - dubbed EcoWorld - where it moved along a stainless steel track, between liquid food was
tewater and normal tap water (for the cathode). For seven days, it operated in that closed environment, before one of the mechanical pumps broke. During that time it existed simply to gather food, to power it to gather more food. But it was significant.
“It’s the first example of artificial symbiosis. It functions to go and collect the food”
’It’s the first example of artificial symbiosis. Each relies on the other. Microbes are metabolising whatever is coming in from the environment, to produce electricity so that the mechatronic element of the system can function. But it functions in order to go and collect the food that the microbes need to stay alive and continue producing electricity. That’s the closing of the cycle.’
When The Engineer visited BRL, Ieropoulos and his team were hard at work on EcoBot-IV. The design is apparently finalised and its constituent parts are currently being tested separately in the wet lab. He’s staying tight lipped as to the exact specifications.
The BRL has a strict policy of not announcing robots to the mainstream press before they are operational, cautious against what it sees as exaggerated claims in the wider robotics community as a whole. Nevertheless, Ieropoulos said his ultimate goal will be to test out the fly-capturing ability that will be enhanced in EcoBot-IV. The plan is to place it in a closed-off arena with maggots, which will then hatch into flies to be captured and digested. ’We have to prove that the energy we give it to begin with is sufficient to allow the robot to operate for X amount of time - the fact that it’s operating beyond that is down to the fact that it’s utilising the flies. We know the energy content of the fly once it hatches, so based on calculations we can say the robot is running on flies.’
But the whole autonomy project is branching out now and the team is starting to ask what sort of functions it may want to equip an energy-autonomous robot with (see box) and what missions they might actually perform.
EcoBot-III’s propensity to slurp on wastewater has already attracted the attention of Wessex Water, which is installing a trial stack of MFCs in its water treatment facilities. It could ultimately lead to robots that roam the sewers entirely autonomously, cleaning blockages and providing a real-time map of a sewer’s conditions, all the time gathering any energy they need. Other missions might venture further underground for mining or exploration. Another strand of the EcoBot is focused on building aquatic robots that have MFCs working in a similar fashion to gills.
’When it comes to real applications such as remote-area access and search and rescue missions, underground and underwater, where it’s vital for the robot to complete the mission, the last thing you want to worry about is the energy,’ said Ieropoulos.
In depth
Microbial Fuel Cells
Researchers are working to develop viable fuel cells based on bioelectrochemical transducers
MFCs are bioelectrochemical transducers that convert biochemical energy generated by microbes directly into electricity. Although the concept can be traced back to the turn of the 19th century, it’s only in the past decade or so that progress has been made in making viable fuel cells.
’The microbes producing the electricity are actually part of the fuel cells - you don’t have a separate system producing methane, for example, and feeding it into a passive fuel cell. You’ve got an active MFC where the microbes inhabit the inside,’ Dr Ioannis Ieropoulos explained.
MFCs consist of two half cells - an anode, which is the bacterial side and has negative polarity (electron generating), and a cathode, which is the oxidising side and has positive polarity (electron accepting) - and the two are separated by a proton-selective membrane.
’It’s there for two reasons: to physically separate the two half cells, but also to chemically bridge them,’ Ieropoulos said. Microbes in the anode chamber can be either planktonic (suspended in liquid solution) and/or as a biofilm attached to the electrode surface. They transfer electrons to the electrode either via electroactive metabolites naturally released by the microbes or direct conduction via conductive pili (nanowires).
In EcoBot-III, the open-circuit voltage and maximum sustainable power output of a single MFC is approximately 0.7V and 50W respectively, so rather low. But as Ieropoulos pointed out: ’If the MFC technology is brought together as a stack, so that you’re stepping up your voltage, stepping up the current and working through an accumulation stage, you can have a system that is operating within normal limits.’
In depth
Artificial Muscles
Electroactive polymers could give the robot a more realistic gut movement or even arms to grab things
Ieropoulos and his team are collaborating with researchers in the biomimetics group at Auckland University and the artificial muscles group at Bristol University, focusing on electroactive polymers (EAPs).
The principle of EAPs is similar to the now commercially mature technology of piezo ceramics in that they can be deformed upon application of a current or, conversely, harvest energy when mechanically deformed themselves. However, EAPs can deform to a much greater degree than piezos, owing to their inherent flexibility, making them especially attractive to robotics researchers.
For Ieropoulos’s robots, EAPs could be used for peristalsis to achieve more realistic gut movement. Alternatively, they could replace motor actuators for appendages and arms.
The group has published recently on the development of an artificial muscular sphincter for waste ejection and an arm that can move and harvest energy by grabbing trees that are moving in the wind.



Red Bull makes hydrogen fuel cell play with AVL
Surely EVs are the best solution for motor sports and for weight / performance dispense with the battery altogether by introducing paired conductors...