Various structures for so-called soft robots, generally based on gels, have been fabricated in recent years. However, controlling these structures has always proved problematic, because of their necessary lack of stiff skeletons to which actuators can be attached. Researchers at North Carolina State University have now unveiled a new approach to soft robot control, employing magnetic fields as a means of moving the parts of the structure.
Soft robots have many potential applications, including manipulating delicate materials and structures in industrial processes and manufacturing, and as parts for assistive devices to help movement in disabled people and to boost workers’ physical strength. The North Carolina team is building on previous work by Prof Orlin Velev of the University’s Chemical and Biomolecular Engineering Department and material scientist Joe Tracy.
The researchers mixed microparticles of iron into a liquid polymer mixture and then applied a magnetic field to the polymer to draw the microparticles into aligned parallel chains. These were fixed into position by allowing the liquid polymer mixture to dry out, leaving an elastic film.
“The chains allow us to manipulate the polymer remotely as a soft robot by controlling a magnetic field that affects the chains of magnetic particles,” Tracy said. Changing the direction and strength of the magnetic field causes the iron micro particle chains to align themselves with the field, dragging the soft elastic structure along with them.
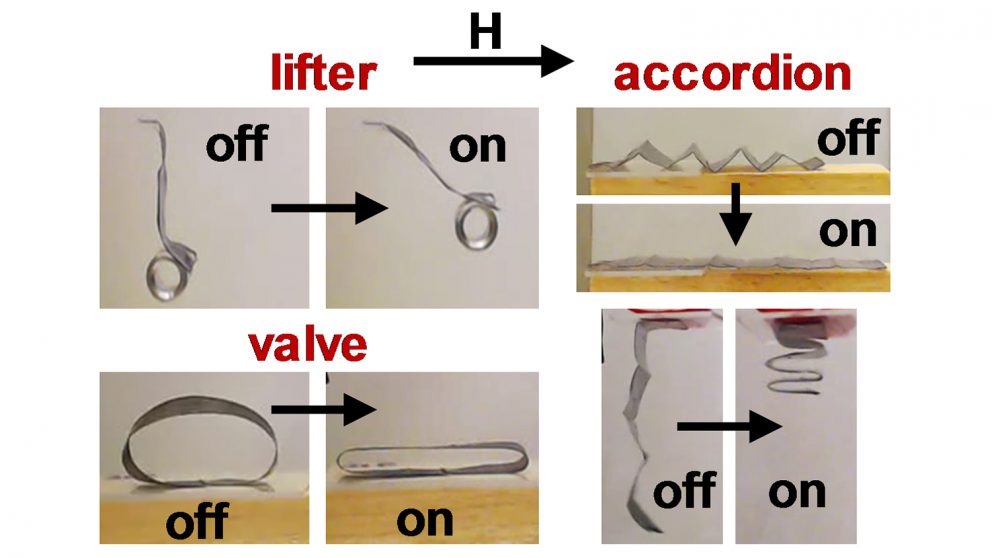
Using this technique, Tracy and colleagues have made three different soft structures. One device is a cantilever that can lift 50 times its own weight, the team claims. Another is an accordion-like structure that can expand and contract to mimic the properties of muscle. The third is a peristaltic pump, consisting of a tube with a compressed section that can be made to travel along its length, forcing any liquid or paste inside the tube to travel along with the compression. The team is now working on methods to improve the power and control of these devices, Tracy said. The team describes their research in a paper in the journal ACS Applied Materials and Interfaces, of which Tracy is corresponding author.
The paper also describes how the team measured the performance of the cantilever device, taking into account the mass lifted, the mass of the particles in the lifter and the applied magnetic field. “We think this is a useful tool for researchers in this area who want to find an empirical way to compare the performance of different devices,” said Dr Ben Evans of Elon University in North Carolina, a collaborator in the research and a co-author on the paper.



Glasgow trial explores AR cues for autonomous road safety
They've ploughed into a few vulnerable road users in the past. Making that less likely will make it spectacularly easy to stop the traffic for...