The dormant volcano Mount Teide towers over the holiday island of Tenerife, officially the highest point in Spain even though it’s hundreds of miles from the Spanish mainland. Some 30km from the package tourist-packed hotels and beaches - two of them vertically - it’s a striking landscape of wrinkled, solidified lava flows, isolated twisted rocks, spectacular cathedral-sized outcrops topped with glistening obsidian and gravelly plains dotted with porous, hollow-sounding pumice.
Vegetation is low and sparse and wildlife is shy and mostly invisible. It looks like the surface of another planet and, indeed, has stood in for one several times in films, as well as forming a vision from the distant past (as a backdrop to Raquel Welch in a fur bikini in One Million Years BC) and the far future (in the recent remake of Planet of the Apes).
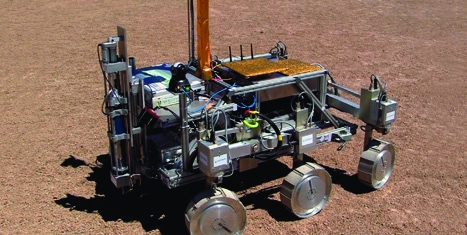
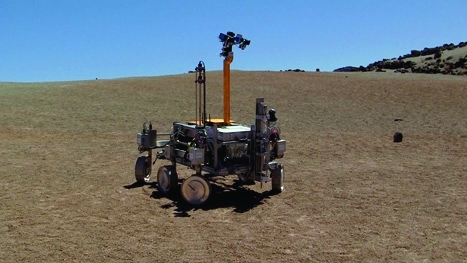
To a space geek, however, the red-tinged rocks and dust make it reminiscent of one particular planet; it looks very much like the images returned from landers on the surface of Mars. That impression was bolstered last month by a strange visitor to Teide’s gravel fields. Silvery, stocky and studded with masts and sensors, the stolid form of one of EADS Astrium’s Mars rover prototypes spent three days trundling cheerily around the landscape accompanied by a motley crew of scientists and engineers, all well equipped with sunblock, bottled water and floppy sunhats.
Field-trial director Lester Waugh, an urbane presence with a strong resemblance to the actor Hugh Bonneville, explained that Teide is, in fact, an ideal substitute for Mars. ’It has lots of different terrains and textures and it’s above the cloud base, so it’s very dry up here. But it’s also very accessible; it’s a National Park so there are good road links and we can get the equipment here and move it around relatively easily.’
Astrium has three rover platforms, named Bruno, Bradley and Bridget, and it’s Bridget that took the trip to the Canary Islands. Constructed as part of the company’s successful pitch to build the rover for the planned EcoMars mission, scheduled for 2018, Bridget is a sturdy little machine, made from extruded aluminium and powered by four golf-cart batteries. ’They’re available and they’re cheap,’ Waugh commented. ’Especially useful for field trials. Last time we were up here, one failed and we just nipped down the mountain to a golf shop and bought another one. A real rover would probably have solar panels, but those aren’t really useful when we want to test for most of the day. If we’d had custom batteries, we’d have been knackered.’
But this trip wasn’t to test Bridget herself; the teams on the volcano were there to test a variety of vision systems and a suite of image processing software called PRoVisG (Planetary Robotics Vision Ground Processing). It is currently being developed as part of the space-science domain of the EU’s Framework 7 research programme, involving 12 institutions across the continent with a strong UK input: from the commercial side, Astrium and SciSys; and from academia, Aberystwyth and Surrey Universities and University College London. It also has two US participants: Ohio University and the Jet Propulsion Laboratory (JPL), based in Pasadena, California. Waugh is lead engineer for the project, while project co-ordinator Gerhard Paar, from the Digital Image Processing Institute of Austrian R&D institution Joanneum Research, was also on hand to observe the trials.
’PRoVisG is mainly dealing with computer vision, making use of images specifically taken from probes on planetary surfaces, such as the moon and Mars,’ Paar explained. ’These can be from moving sources - rovers, in other words - but also from static landers. We can exploit images from older missions, such as the Viking probes and other US and Russian landers.’

The software works by converting digital image data into 3D panoramas, which can be moving animations or still images. ’This will allow scientists to see what’s really there,’ Paar said. ’They’ll be able to measure objects accurately in three dimensions and see the layering of rock strata in detail. It will also help with the autonomy of these missions; the cameras can help robots spot sites of interest automatically, which will make the missions much more efficient. You won’t have to send the images to Earth for scientists to decide targets, which can take a day because you’re waiting for the windows for radio connection.’
Until you’ve tried to integrate it into a rover, you have no idea if it will work
GERHARD PAAR, JOANNEUM RESEARCH
The fact that US institutions are involved is highly significant, Paar added. ’The US is far ahead in rover and lander technology; they’ve had all the experience and a much greater budget. But with software, we are at least equal and in some cases ahead of them.’ Indeed, part of the rationale of PRoVisG is to build up Europe’s expertise in robot exploration technology to assist its institutions in getting their technology onto planetary exploration missions, as well as to establish its independence from US or Russian missions.
’But I have to stress that we are not in competition with the US,’ Paar said. ’We get knowledge from them; they get knowledge from us. I think it’s the way to go because budgets are getting so much tighter; we need to pool our resources.’
The Teide tests, although not using autonomous navigation, were however designed to test whether the system could be used for this purpose. Paar’s team had navigated the rover around a landscape dotted with white spheres, whose location was plotted with GPS. ’We located them in the video stream and measured their location very accurately,’ he said.
Bridget is peering at the world through a varied array of eyes. On top of a tall mast in the centre of the rover is a pair of cameras that together make a 3D panoramic imager called PanCam, which has been developed at Aberystwyth. Between those is a hyperspectral camera that scans across a range of light wavelengths, which provides information on the composition of the rocks it is looking at.
The rover also carries two cameras developed at CSEM, the Swiss Centre for Electronic and Microtechnology, both taking an innovative approach to 3D imaging. One of these, a small black box mounted on the front of the rover looking downwards, is a time-of-flight infrared (IR) camera, which sends beams of IR light down to the ground and detects the return of their reflection with an active sensor. ’It constructs the image based on the time it takes for the reflection,’ Waugh explained. ’It’s very experimental - the resolution is quite low at the moment - and it’s low powered, so during the day the heat of the sun tends to swamp the signal. But we’re getting very good results from using it in shadow and it actually works much better at night.’
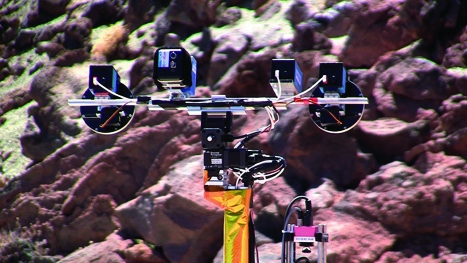
The other Swiss device is OmniCam, an omnidirectional camera - an odd-looking series of black boxes mounted on four slim steel pillars near the front of Bridget’s main platform. ’A serious bit of kit, this; it’s very unusual,’ Waugh said. ’The camera points upwards and takes a picture of the reflection in a shaped mirror, so you get a 360º image, like an extreme fish-eye. You have to unfold the image to make sense of it, because the sky is in the middle; they’ve written software for that. The advantage of it is that you can use it to judge distance and you can do it with a single video stream; you don’t have to take two images and do a lot of complex interpolation.’
When processed, OmniCam images might look similar to those produced by the PanCam array, Waugh said, but PanCam works by rotating on the mast and producing a series of images that are then stitched together. ’CSEM is very experimental in its approach and the thing with these cameras is that they would be of no use or value if we flew them on a mission today, whereas PanCam is almost flight ready now. But as time goes by they understand the issues and improve the technology, and you get to the point where these are the types of cameras that you have to fly.’
One of the problems that the team was encountering was a certain amount of wobble
Among the problems that Waugh’s team was encountering on Tenerife was a certain amount of wobble. The PanCam and HyperCam arrays are mounted on a 6ft-high mast for a good reason, he explained.
Up there, the image that they capture is what a human on the surface of the planet would see, which makes them far easier for geologists to interpret than an overhead shot from a satellite or a ground-level view. ’But there’s a significant moment with the weight at that height and one of the things we’re trying to do is cope with the swaying movement as the rover goes over uneven ground,’ Waugh said.
In this, physics is the roboticist’s friend. The planetary bodies that we want to study are all smaller than the Earth and therefore have lower gravity. ’The mass remains the same, of course, but the weight goes down and that tends to smooth things out,’ Waugh said. The way the rover is powered also helps - all six wheels have electric hub motors; the four corner wheels steer. Moreover, the vehicle is equipped with two suspension systems - the front pair of wheels on either side is connected by a pantograph-type system and the rear wheels have a simple up-and-down mechanism. ’That helps us prevent shock and vibration,’ he explained.
Despite the difficulties of operating a rover, it’s an indispensable part of testing, according to Waugh. ’You can develop the best camera systems in the world but, until you’ve tried to integrate it into a rover, you have no idea whether it’ll really work,’ he said. ’You have to contend with the problems of power consumption, and the total amount of power you can use in a day; the system’s no good if it takes a nuclear power station to run it. You have to think about the processing power and getting information back to your base.
’We do a lot of systems engineering; the whole point of the rover is to get a payload onto the planet in such a way that it all works. If you can’t get that, the mission is useless. Other planets are really hard places to get to - if we don’t test these things as much as we can in circumstances we can control, then everyone’s just wasting their time.’
In depth red alert
The ExoMars rover project, conceived to find signs of past life, is being put on hold due to monetary concerns
The ExoMars project is currently facing problems, owing to pressing budgetary concerns from NASA. The project was originally conceived as a two-rover mission: Europe’s ExoMars rover, equipped to drill core samples and use on-board equipment to test for compounds that could indicate the presence of past life, was to be accompanied by an American rover called Max-C that would find and collect interesting rock samples, storing them for recovery by a future ’sample return’ mission. Both rovers would ride a single rocket to the Red Planet and be landed using the US’s Skycrane system, which it is testing later this year with its latest Mars rover, currently en route.
In March of this year, however, the US National Research Council said that it was short of $1bn (£6.4m) of the projected $3.5bn cost of the US side of the mission and that the project would have to be delayed indefinitely or scaled back.
One option mentioned by the NRC is to simply leave the European rover behind, but the council felt that a better option would be to combine the functions of ExoMars and Max-C into a single rover, which would be delivered, as arranged, on a US launcher.
This is the plan that Waugh and his team are currently preparing for, although many of the technologies mounted on Bridget are aimed at missions further in the future, such as the possible exploration of Titan or the moons of Jupiter. However, the US is also considering going it alone with Max-C at a future date, leaving ExoMars without a lift. This is why the ESA is so keen to develop parallel and equal capability - and is in a hurry to do so.
In depth rock star
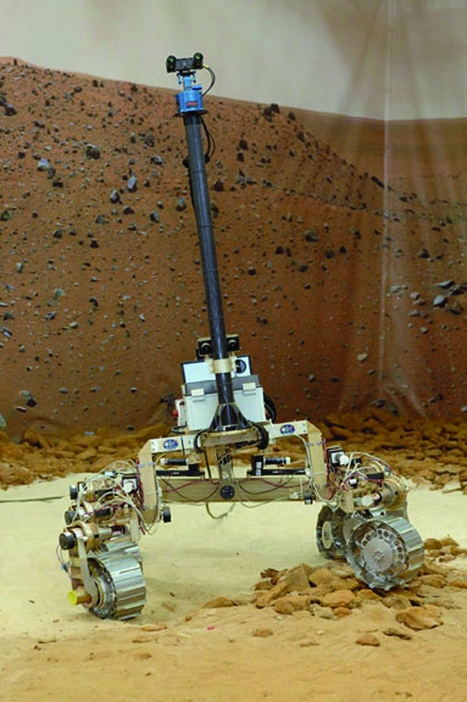
Bruno, ’brother’ of Bridget, is testing a navigation system that will help the rover to navigate a rocky environment
Bridget’s brother, Bruno, isn’t managing to clock up the air miles of his sister, but is working equally hard. Confined to the ’Mars Yard’ - a mock-up of the Martian surface at EADS Astrium’s Stevenage site - Bruno is testing the all-important autonomous navigation system that will help the rover make its way around the rocky landscape without needing to refer back to mission control.
The guidance, navigation and control (GNC) system allows rovers to plot their own route to sites of interest selected by the mission team. Bruno’s task in the recent trials was to detect an insurmountable obstacle (a heap of rocks, in this case), plot a course around it and execute this route. He was also able to detect and overcome unexpected deviations, such as being shunted off to the left by a small heap of rocks. Both of these tasks would have been impossible for previous rovers, according to the ESA.
In practice, the ESA hopes to combine the GNC system with the PRoVisG system to provide a complete vision and autonomous navigation package to both provide scientific data and guide the vehicle.



Swiss geoengineering start-up targets methane removal
No mention whatsoever about the effect of increased methane levels/iron chloride in the ocean on the pH and chemical properties of the ocean - are we...