
The £4m Innovate UK-funded project, known as MIMRee (Multi-Platform Inspection, Maintenance and Repair in Extreme Environments), will develop and test an autonomous crew, consisting of an unmanned vessel, drone and crawling robot.
The technology is expected to save an average wind farm £26m over its lifetime.
Inspection and repair of offshore wind turbine blades is carried out by human technicians working on ropes in extreme conditions. Such inspections can only take place during restricted windows when the weather is good, according to Tony Fong, engineering manager for operational performance at the Offshore Renewable Energy (ORE) Catapult, which is providing its engineering expertise and testing facilities to the project.
“Specialist rope access teams have to descend down each of the blades in order to inspect and maintain them,” said Fong. “The turbines also have to be shut down during this maintenance, which costs the industry money because the turbines aren’t generating [electricity] during this time.”
The daily use of crew transfer vessels is also expensive, he said.
The two-year project will be led by Cambridge-based non-destructive testing specialist Plant Integrity.
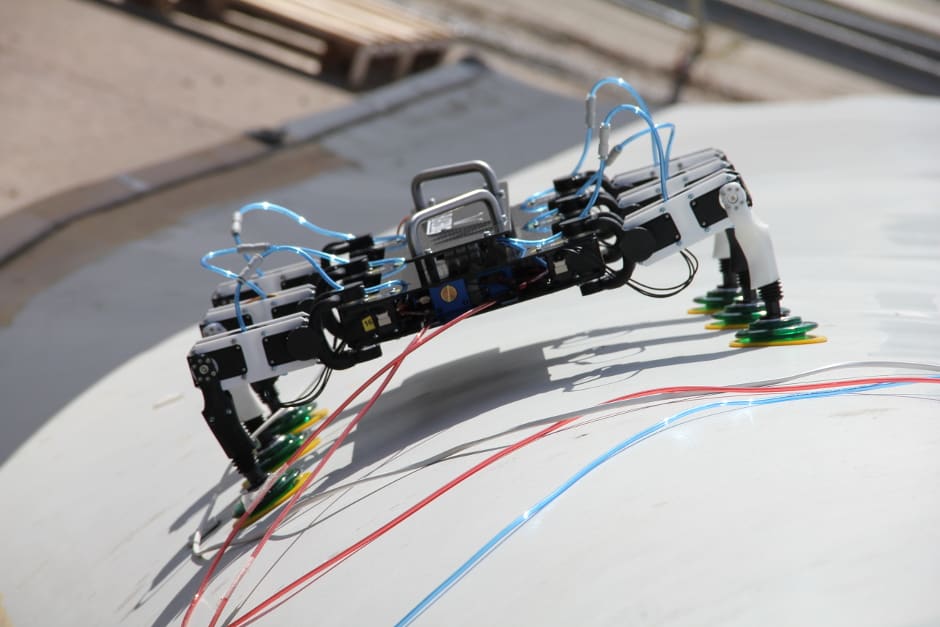
The robotic crew will consist of Thales’ Halcyon autonomous vessel, as well as a drone system being developed by researchers at Bristol University, and the six-legged crawling repair robot BladeBUG, invented by entrepreneur Chris Cieslak.
“There will be a level of communication and teamwork between these systems that hasn’t been done before,” said Fong.
A system for transporting, deploying and retrieving the blade crawling robot will be developed at Manchester University, while an artificial intelligence (AI) system designed to coordinate the mission and allow onshore personnel to analyse data transmitted by MIMRee is being developed at Royal Holloway University of London.
“The vessel will autonomously navigate its way safely to the wind turbines, and will then perform an inspection using a special camera, also developed by Thales,” said Fong. “This camera should be able to inspect the blade while the turbine is still rotating, allowing us to carry out a good level of inspection without losing any electricity generation.”
The on-board drone will then take off from the mothership, and carry out its own, closer visual inspection if needed, before going back to the vessel to pick up the crawling robot and place it on the turbine blade.
BladeBUG’s developer evaluated numerous types of robot for use in turbine inspection, but the complex shape of the blades, including their curvature and the addition of objects such as fin-shaped vortex generators, coupled with the need to travel from one side of a blade to the other, meant a legged robot was the best option, Fong said.
“The expectation is that the robot will be able to carry out more advanced inspections, such as high-resolution imaging and non-destructive sensing including ultrasound,” he said.
An electronic skin, developed by Wootzano, will “feel” the surface to collect data on the blade surface structure.
The robot will also be capable of carrying out basic maintenance tasks, such as cleaning and resurfacing the blades, thanks to a robotic arm developed by the Royal College of Art Robotics Laboratory.
“If there is minor damage to the paint surface on the blade, such as leading-edge erosion, the robot has the potential to go up and smooth out the surface, and apply a little bit of protective paint, to keep the turbine going in the most efficient manner,” Fong said.



Project to investigate hybrid approach to titanium manufacturing
What is this a hybrid of? Superplastic forming tends to be performed slowly as otherwise the behaviour is the hot creep that typifies hot...