Roboticists have developed Romu, a machine that autonomously drives interlocking steel sheet piles into soil, an advance that could see robots installing retaining walls or check dams for erosion control.
The study, carried out at Harvard's Wyss Institute for Biologically Inspired Engineering, will be presented at the upcoming 2019 IEEE International Conference on Robotics and Automation.
Romu uses its own weight to drive sheet piles into the ground. According to Wyss, this is made possible by each of its four wheels being coupled to a separate linear actuator, which also allows it to adapt to uneven terrain and ensure that piles are driven vertically.
From a raised position, Romu grips a sheet pile and then lowers its chassis, pressing the pile into the soil with the help of an onboard vibratory hammer. By gripping the pile again at a higher position and repeating this process, the robot can drive a pile much taller than its own range of vertical motion. After driving a pile to sufficient depth, Romu advances and installs the next pile that interlocks with the previous one and forms a continuous wall.
The Romu project began as an exploration of methods for automated site preparation and installation of foundations for earlier Wyss Institute systems to build on.
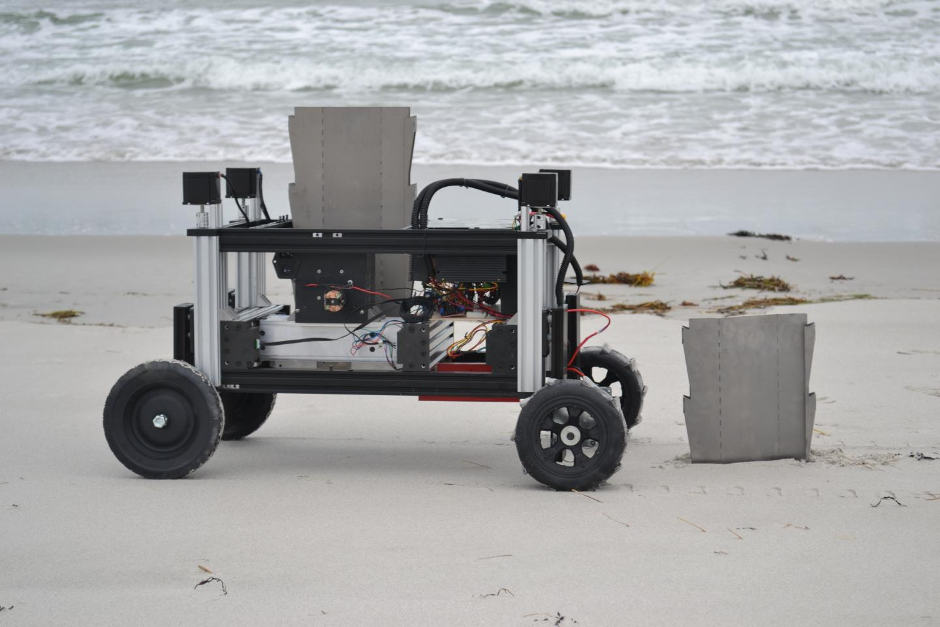
"In addition to tests in the lab, we demonstrated Romu operating on a nearby beach," said Melenbrink. "This kind of demonstration can be an icebreaker for a broader conversation around opportunities for automation in construction and land management. We're interested in engaging with experts in related fields who might see potential benefit for the kind of automated interventions we're developing."
https://www.youtube.com/watch?v=KtwKQGGA_KE
The researchers believe Romu robots could work together as a collective or swarm. In computer simulations they demonstrated that teams of Romu robots could make use of environmental cues like slope steepness in order to build walls in effective locations, making efficient use of limited resources.
"The swarm approach gives advantages like speedup through parallelism, robustness to the loss of individual robots, and scalability for large teams," said senior research scientist Justin Werfel. "By responding in real-time to the conditions they actually encounter as they work, the robots can adapt to unexpected or changing situations, without needing to rely on a lot of supporting infrastructure for abilities like site surveying, communication, or localisation."
"The name Terramanus ferromurus [Romu] is a nod to the concept of 'machine ecology' in which autonomous systems can be introduced into natural environments as new participants, taking specific actions to complement and promote human environmental stewardship," said researcher Nathan Melenbrink. In the future, the Terramanus family could be extended by additional robots carrying out different tasks.
Based on their findings, the team is now said to be interested in investigating interventions ranging from groundwater retention structures for supporting agriculture in arid regions, to responsive flood barrier construction for hurricane preparedness. Future versions of the robot could perform other interventions such as spraying soil-binding agents or installing silt fencing, such that a family of these robots could act to stabilise soil in a wide range of situations.
"Clearly, the needs of many degraded landscapes are not being met with the currently available tools and techniques," said Melenbrink. "Now, 100 years after the dawn of the heavy equipment age, we're asking whether there might be more resilient and responsive ways to approach land management and restoration.”



Project to investigate hybrid approach to titanium manufacturing
What is this a hybrid of? Superplastic forming tends to be performed slowly as otherwise the behaviour is the hot creep that typifies hot...