Endoscopic medical robot surgery relies on mounting remotely-controlled tools on the end of a flexible device that surgeons can manoeuvre through pathways in the body to sites that would be difficult or too damaging to reach via conventional surgery.
One drawback of the technique is that the tools on the end of the endoscope have to be rigid, which reduces the dexterity and sensitivity of the surgeon operating the device.
Researchers from the Wyss Institute for Biologically-Inspired Engineering at Harvard University, who are working with a technique known as pop-up fabrication, have now developed a hybrid soft-rigid robot arm for endoscopic surgery that includes integrated sensors, and also possesses unprecedented flexibility and multiple degrees of freedom of movement.
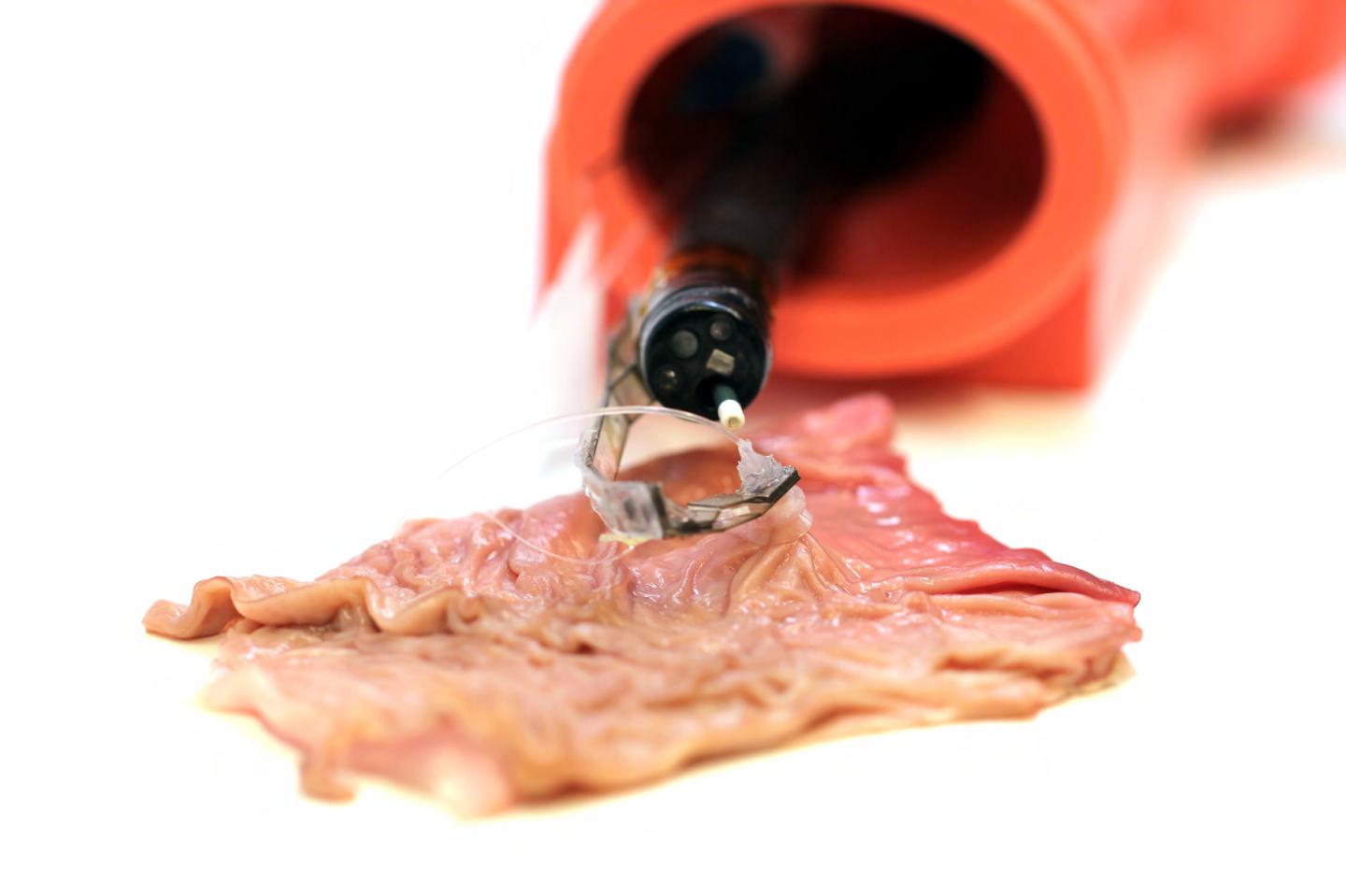
So far tested on animal tissues, the arm lies flat on an endoscope until it reaches the surgical site, then pops up to perform surgery.
Pop-up fabrication first came to notice in 2013 when a team led by Prof Robert Wood at the Wyss Institute used it to build tiny flying robots known as Robobees.
Components were cut from thin sheets of material which were layered and folded into shape, using piezoelectric actuators to flap their wings rapidly for flight. For a surgical device, actuation involving voltages or high temperatures is not suitable, so the team developed soft actuators that move the robotic parts of the system without damaging nearby tissues, which is a major advantage of soft robotics in surgery.
"At the millimetre scale, a soft device becomes so soft that it can't damage tissue but it also can't manipulate the tissue in any meaningful way,” explained Tommaso Ranzani, a postdoctoral fellow in Wood's lab at the Wyss Institute and co-author of a paper detailing the research in the journal Advanced Materials Technology. “That limits the application of soft microsystems for performing therapy. The question is, how can we develop soft robots that are still able to generate the necessary forces without compromising safety?"
The soft actuators depend on water pressure for their operation. They are connected to the rigid components of the system with an irreversible chemical bond. The arm also has a capacitative sensor that measures the force the arm is exerting on tissue and gives feedback to its operator, and an octopus-inspired suction cup to manipulate tissues.
"The ability to seamlessly integrate gentle yet effective actuation into millimetre-scale deployable mechanisms fits naturally with a host of surgical procedures," said Sheila Russo, lead author of the paper. "We are focused on some of the more challenging endoscopic techniques where tool dexterity and sensor feedback are at a premium and can potentially make the difference between success and failure."
Russo and her team have already demonstrated that the arm can be fabricated at a size of 1mm, which would theoretically enable it to work inside the structures of the lungs or even the brain. Ex-vivo testing on tissues from pigs has been successful; the next step will be to test in vivo.



Project to investigate hybrid approach to titanium manufacturing
What is this a hybrid of? Superplastic forming tends to be performed slowly as otherwise the behaviour is the hot creep that typifies hot...