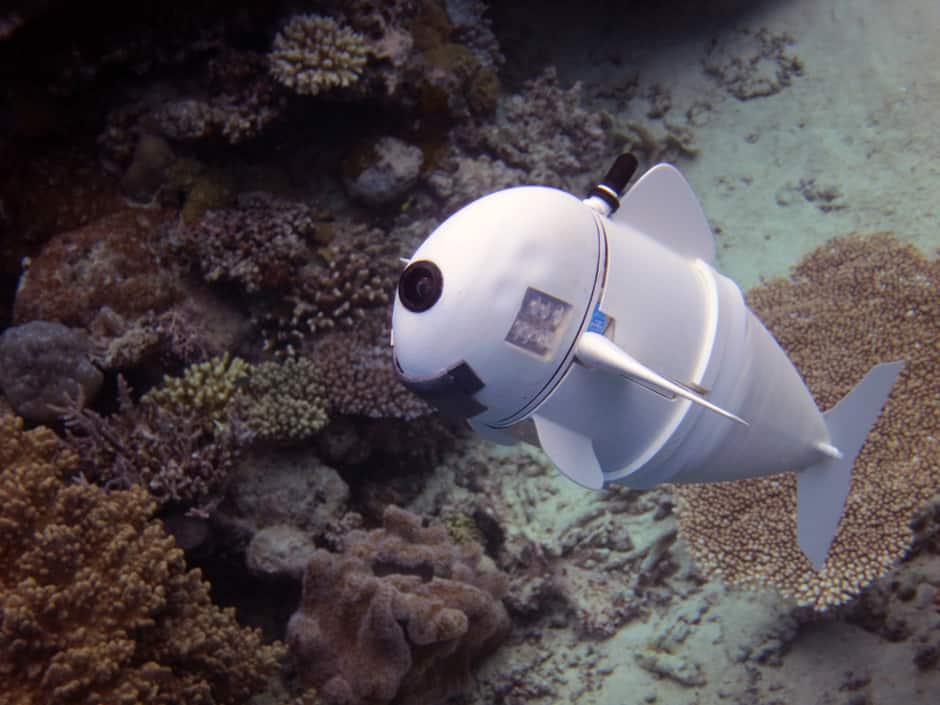
In a new paper, the team at CSAIL has unveiled SoFi, a robotic fish that can swim on its own alongside real fish in the ocean.
During test dives, SoFi swam at depths of over 50 feet for up to 40 minutes whilst taking high-resolution imagery and negotiating currents.
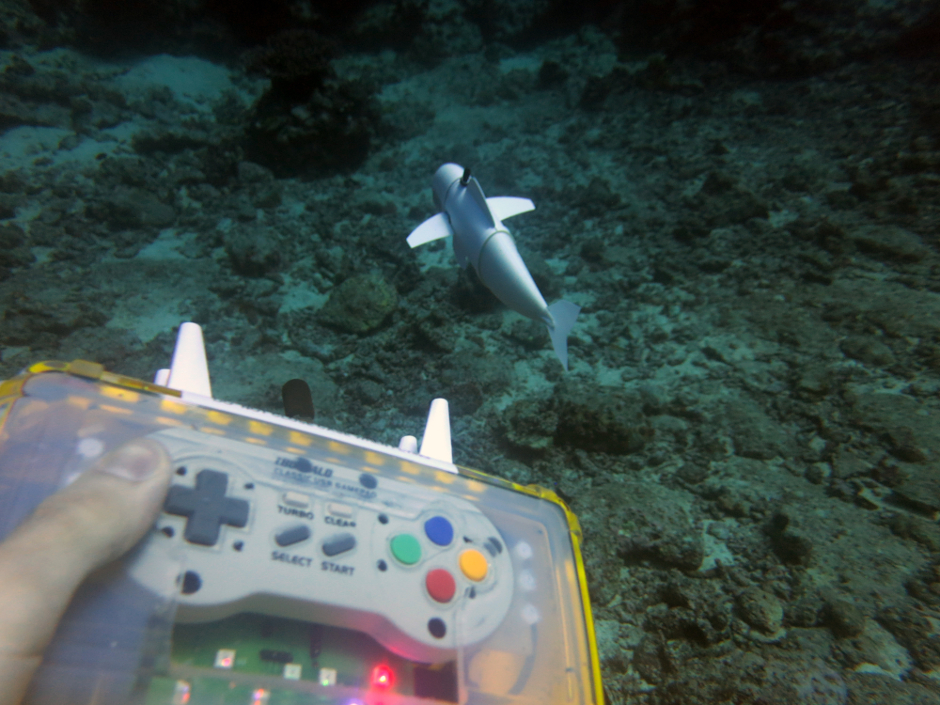
Using its undulating tail and ability to control its own buoyancy, SoFi can swim in a straight line, turn, or dive up or down. The team also used a waterproofed Super Nintendo controller and developed a custom acoustic communications system that enabled them to change SoFi’s speed and command specific moves and turns.
“To our knowledge, this is the first robotic fish that can swim untethered in three dimensions for extended periods of time,” said CSAIL PhD candidate Robert Katzschmann, lead author of the new journal article published in Science Robotics. “We are excited about the possibility of being able to use a system like this to get closer to marine life than humans can get on their own.”
Katzschmann wrote the paper with CSAIL director Daniela Rus, graduate student Joseph DelPreto and former postdoc Robert MacCurdy, who is now an assistant professor at the University of Colorado at Boulder.
According to CSAIL, existing autonomous underwater vehicles (AUVs) have traditionally been tethered to boats or powered by propellers but SoFi has a simpler and more lightweight set-up, with on-board sensors for perception, a servo motor and lithium polymer battery.
To swim, the motor pumps water into two balloon-like chambers in the fish’s tail. As one chamber expands, it bends and flexes to one side; when the actuators push water to the other channel, that one bends and flexes in the other direction.
These alternating actions create a side-to-side motion that mimics the movement of a real fish. By changing its flow patterns, the hydraulic system enables different tail manoeuvres that result in a range of swimming speeds that average at around half a body length per second.
“A robot like this can help explore the reef more closely than current robots, both because it can get closer more safely for the reef and because it can be better accepted by the marine species,” said Cecilia Laschi, a professor of biorobotics at the Sant'Anna School of Advanced Studies in Pisa, Italy.
The entire back half of the fish is made of silicone rubber and flexible plastic, and several components are 3D-printed, including the head, which contains SoFi’s electronics. To reduce the chance of water leaking the team filled the head with baby oil as it won’t compress from pressure changes during dives.
One of the team’s biggest challenges was to get SoFi to swim at different depths. To resolve this, the robot has two fins on its side called “dive planes” that adjust the pitch of the fish for up and down diving. To adjust its position vertically, the robot has an adjustable weight compartment and a buoyancy control unit that can change its density by compressing and decompressing air.
Katzschmann said that the team developed SoFi with the goal of being as non-disruptive as possible, from the minimal noise of the motor to the low-frequency emissions of the team’s communications system, which sends commands using wavelengths of 30 to 36kHz.
“The robot is capable of close observations and interactions with marine life and appears to not be disturbing to real fish,” said Rus.
Planned improvements to SoFi include increasing the fish’s speed by improving the pump system, and modify the design of its body and tail.



Nanogenerator consumes CO2 to generate electricity
Whoopee, they've solved how to keep a light on but not a lot else.