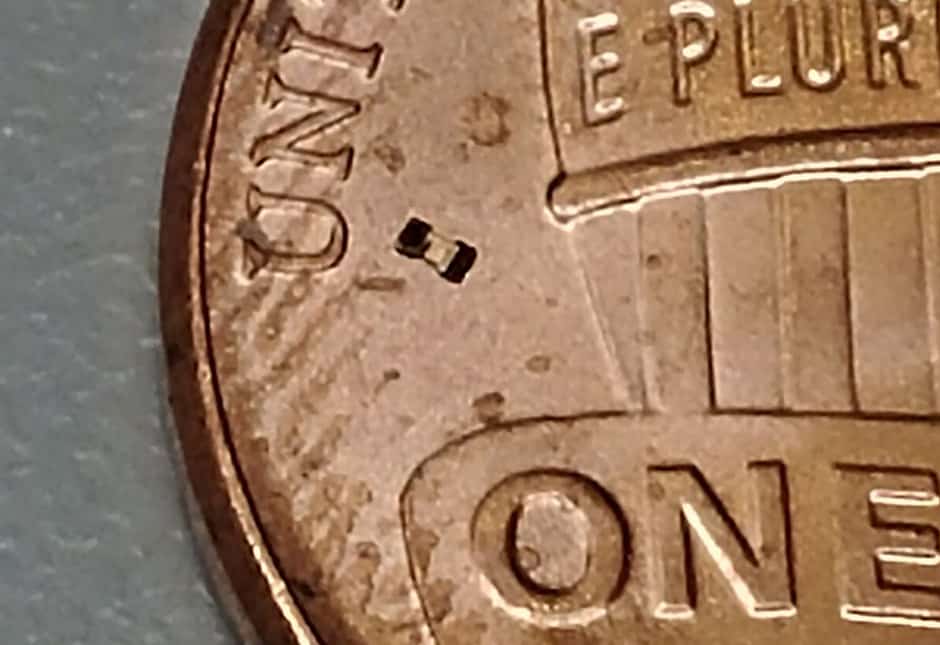
Engineers at Purdue University have devised this highly unusual mode of locomotion for constructions measuring around 400 by 800µm, which can act as medical microbots inside the body.
Medical microbots might bring to mind the miniaturised submarine in the classic science fiction film Fantastic Voyage, but in reality they are less likely to be surgical devices than to be drug delivery vehicles that can be guided and steered to deliver their payload at a specific point in the body. It is the guidance system that has proved to be the biggest challenge in developing such systems.
Magnetic fields have for some time been an attractive method of guiding and propelling microbots, but very strong fields have, until now, always been necessary. The Purdue team, led by David Cappelleri, director of the Multiscale Robotics and Automation Lab in the University's School of Mechanical Engineering, devised its new approach by building in magnetism to the robot itself.
In a paper in the journal Micromachines, the team details how they constructed their microbot from polymer materials in a flat, roughly dumbbell shape with magnetic ends and non-magnetic midsection. “Robotics at the micro-and nano-scale represent one of the new frontiers in intelligent automation systems,” Cappelleri said.
When influenced by a constantly rotating magnetic field, the microbots, dubbed µTUMs by the researchers, tumble end-over-end at speeds of around 60 body lengths per second (48mm/s) in dry environments and 17 body lengths per second (13.6mm/s) in wet environments, such as water or silicone oil, which mimics the conditions found inside the body.
As well as reducing the field strength needed to move the robot, the tumbling motion gives it a surer footing on surfaces. At very small scales, electrostatic interaction between particles can cause microbots to get stuck.
“Unlike the µTUM, other microscale robots use a rocking motion under an alternating magnetic field, where contact between the robot and the surface is continually lost and regained,” said Chenghao Bi, a graduate student and lead author of the paper. “Though the continuously rotating field used for the μTUM is harder to implement than an alternating field, the trade-off is that the tumbling robot always has a point in contact with the ground, provided that there are no sharp drop-offs or cliffs in its path. This sustained contact means that the μTUM design can take advantage of the constant adhesion and frictional forces between itself and the surface below it to climb steep inclined terrains.”
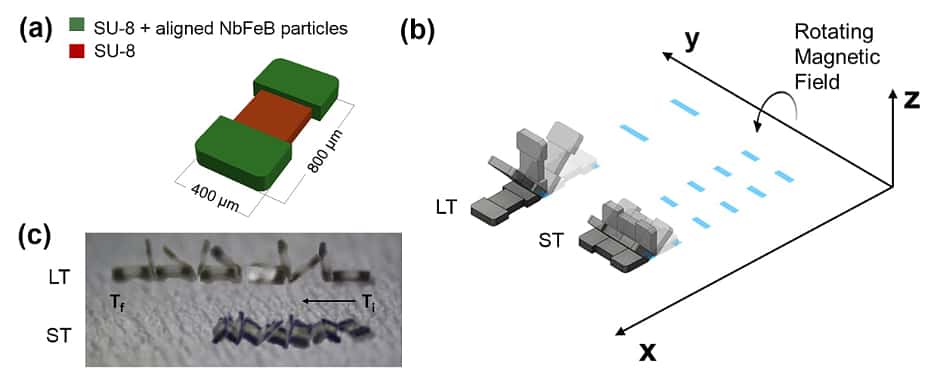
Left: a schematic of the new microTUM robot. The robot tumbles in two modes, as shown at right. At bottom, a still photo of the microbot’s motion is captured from a video. (Purdue University image/ Chenghao Bi, Maria Guix)
The ability to climb is particularly useful for a medical microbot, added another of the research team, Maria Guix, because of the inclined, bumpy and sticky surfaces found inside blood vessels. The µTUM can climb inclines as deep as 60°.
Unlike other medical microbots, µTUMs are made without the need for complex designs and fabrication methods, using the standard photolithography techniques established in the semiconductor industry.
The next phase of research will focus on dynamic modelling of the robot to predict its trajectory of the complex terrains, and will look at how it could cope with interfaces between different environments. The team also hopes to develop a vision based control system using cameras or sensors for tracking and precise navigation, and will investigate whether the bots can manipulate objects for potential industrial applications. New designs for the midsection of the bot will also be investigated.
“For all the design configurations considered, the midsection of the robot was kept non-magnetised in order to explore the future possibility of embedding a payload in this area of the robot,” Cappelleri said. “Replacing this area with a compliant material or a dissolvable payload could lead to improved dynamic behavior, and in-vivo drug delivery, respectively, with far-reaching potential in micro-object manipulation and biomedical applications.”
The tumbling robots can be seen in action here:



April 1886: the Brunkebergs tunnel
First ever example of a ground source heat pump?