The project is being entered into the US Defense Advanced Research Projects Agency’s Subterranean Challenge, a multi-year robotics competition with a $2m prize.
The Carnegie Mellon team is one of six teams that will receive up to $4.5m from DARPA to develop the robotic platforms, sensors and software necessary to accomplish complex underground missions.
According to CMU, the robots will be tasked with rapidly mapping, exploring and exploiting underground environments that range from spaces that humans can only crawl through, to areas big enough to accommodate an all-terrain vehicle.
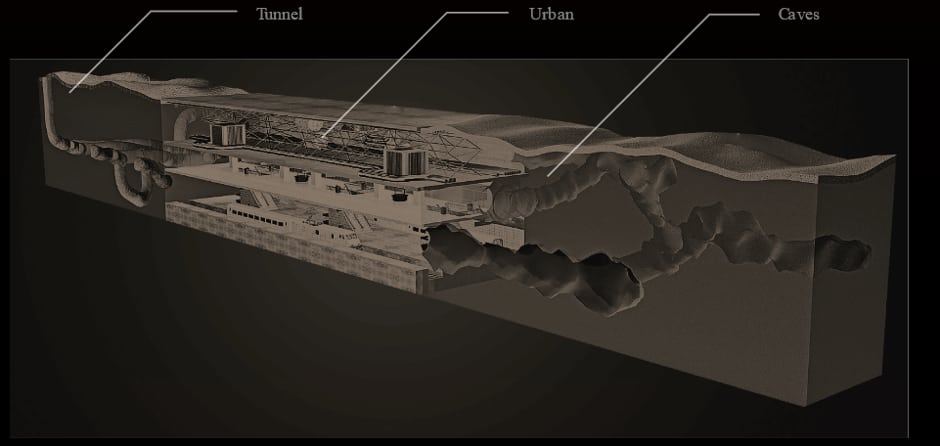
The challenge is designed to provide armed forces and emergency services with the capabilities they need to accomplish a variety of missions in caves, tunnels or underground facilities in towns and cities.
“Successfully completing these missions will require multiple robots, including both drones and ground vehicles,” said Sebastian Scherer, who will lead the team with Matt Travers, both of CMU’s Robotics Institute. “Our team has a wealth of experience in operating robots in mines, enclosed spaces and the wild, and in coordinating the activity of multiple robots.”
Travers, a systems scientist in the Robotics Institute, said the CMU team will leverage its expertise in developing robots that can be rapidly built and reconfigured to adapt to widely varied environments.
“We can’t be sure that a four-wheeled platform will always be the right robot for every job, so we need to be ready to add wheels or substitute tracks or even legs,” Travers said. “In some environments, small robots might be our only option, while others may demand larger, more robust robots.”
Scherer, a senior systems scientist, said communications will be a major challenge underground, and that getting robots to work cooperatively to ensure a space is comprehensively mapped is critical.
Team member Geoff Hollinger, an assistant professor of mechanical engineering at Oregon State and a CMU robotics alumnus, has been recruited to the team for his expertise in multirobot systems.
“Creating robots that can work in subterranean environments will expand the potential application of robots both underground, such as in mines, and inside structures, such as buildings, ships and aircraft,” Scherer said. “The constraints robots encounter in these confined spaces are enormous, so we have our work cut out for us.”
https://www.theengineer.co.uk/elon-musk-thai-cave/
In addition to DARPA funding, the team is receiving support from Boeing and from Near Earth Autonomy, a spinoff of the Robotics Institute. The team also is seeking additional commercial and foundation sponsors.
Beginning in the autumn of 2019, DARPA will conduct a series of challenges, including one each in man-made tunnels, natural caves and underground structures. A final event in the autumn of 2021 will combine all three types of subterranean environments.
The DARPA competition takes place on two tracks: the systems track, in which teams including CMU develop and demonstrate physical systems for live competitions; and a virtual track, in which teams develop software and algorithms to compete in simulated environments. DARPA will award $2m to the winner of the systems track and $750,000 to the winner of the virtual track.



Red Bull makes hydrogen fuel cell play with AVL
Formula 1 is an anachronistic anomaly where its only cutting edge is in engine development. The rules prohibit any real innovation and there would be...