
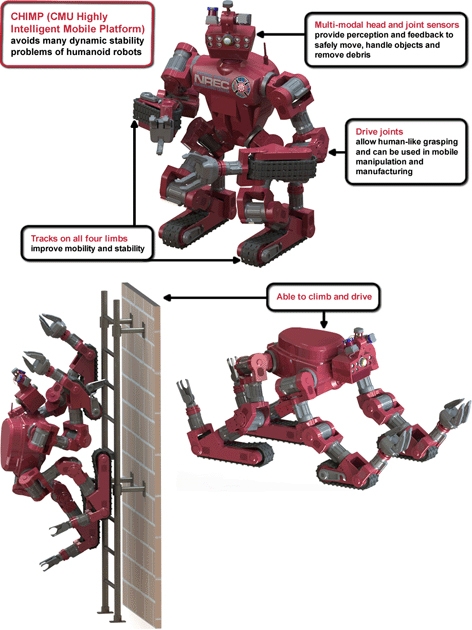
CHIMP (CMU Highly Intelligent Mobile Platform) has simian resemblance but rubberised tracks on the extremities of its four limbs give it the locomotion of a tracked vehicle.
According to CMU, this configuration offers an advantage when moving over debris. CHIMP can, however, move on the treads of two limbs when needed, such as when tasked to use one or more limbs to open a valve, or to operate power tools.
CHIMP will have to perform these and other tasks during the Defense Advanced Research Projects Agency’s (DARPA) Robotics Challenge (DRC), in which robots will have human-like capabilities to respond to events such as the 2011 Fukushima nuclear plant disaster. Climbing ladders and driving vehicles are said to be among the obstacles robots will face in environments engineered for people.
The NREC entry, Tartan Rescue Team, is one of seven selected by DARPA for DRC Track A, in which each team will develop its own hardware and software.
In operation CHIMP will be able to perform complex, physically challenging tasks through supervised autonomy. On-board sensors build a texture-mapped, 3D model of the environment that CHIMP uses to maintain stability and prevent collisions. The same 3D model is said to enable an operator to visualise the location and orientation of CHIMP and evaluate possible actions.
The robot will also be pre-programmed to execute tasks such as grasping a tool, stepping on a ladder rung or turning a steering wheel without step-by-step direction from the human controller, circumventing the lag between command and execution.
‘Humans provide high-level control, while the robot provides low-level reflexes and self-protective behaviours,’ said Tony Stentz, NREC director and Tartan Rescue Team leader. ‘This enables CHIMP to be highly capable without the complexity associated with a fully autonomous robot.’
The final DRC event will be held in 2014, with the winner receiving $2m.



Project to investigate hybrid approach to titanium manufacturing
What is this a hybrid of? Superplastic forming tends to be performed slowly as otherwise the behaviour is the hot creep that typifies hot...