Bendy bots use twisty telescopic limbs
Researchers at Carnegie Mellon University have formulated a new technique for designing telescopic structures that can bend and twist, forming collapsible robots.
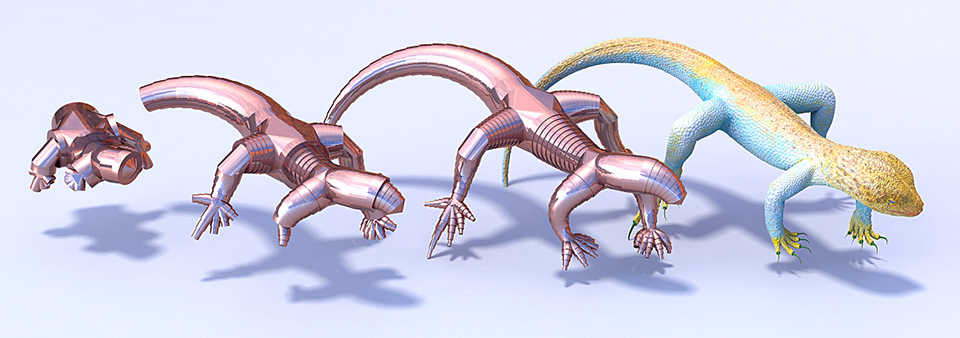
Traditionally, telescopic structures have taken on straight forms. Now, the Carnegie Mellon team has devised algorithms that transform complex shapes into curved telescopic forms, where smaller pieces nest within larger ones. The tool has been used to design a rapidly deployable tent structure, as well as telescopic robotic lizards and octopuses.
"Telescoping mechanisms are useful for designing deployable structures," said Keenan Crane, assistant professor of computer science at Carnegie Mellon. "They can collapse down into really small volumes and, when you need them, are easily expanded."
Though the nested pieces can potentially have a variety of shapes, the team focused on those with circular cross sections, similar to a sailor’s spyglass. Using this shape, the researchers found that it was possible for individual curved segments to rotate, adding 3D twists to what otherwise would be 2D shapes.By adding connectors, the team was able to combine several telescopic structures into larger assemblies.
Register now to continue reading
Thanks for visiting The Engineer. You’ve now reached your monthly limit of news stories. Register for free to unlock unlimited access to all of our news coverage, as well as premium content including opinion, in-depth features and special reports.
Benefits of registering
-
In-depth insights and coverage of key emerging trends
-
Unrestricted access to special reports throughout the year
-
Daily technology news delivered straight to your inbox



Water Sector Talent Exodus Could Cripple The Sector
Maybe if things are essential for the running of a country and we want to pay a fair price we should be running these utilities on a not for profit...