July 1960: An automatically fast lane to the future
The Engineer's report on early plans for autonomous vehicles

Many of today’s cars roll off the production line with a myriad of safety features that help keep motorists safe in those moments when concentration wanes and traffic is dense.
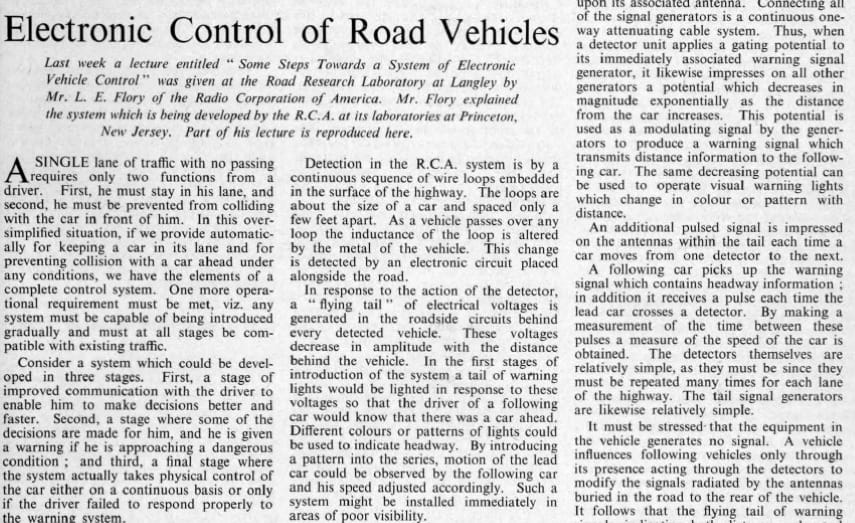
Safety features such as lane-departure warning, automatic emergency steering, automatic emergency braking, and lane keep assist issue audible or tactile warnings to drivers deviating from their lane. However, good ideas like these have to start somewhere and in July 1960 a Mr LE Flory of the Radio Corporation of America (RCA) delivered a lecture at the Road Research Laboratory (or Transport Research Laboratory Ltd as it is known today) on a new system aimed at controlling cars electronically.
But where today’s automotive manufacturers market driver assistance and greater autonomy in terms of preserving life, Mr Flory saw the prevention of accidents largely in terms of cold, hard cash.
“The cost of accidents in property damage and loss of time is, in the United States, equal to the cost of fuel consumed,” he told his audience in a talk titled ‘Some steps toward a system of electronic vehicle control’.
Register now to continue reading
Thanks for visiting The Engineer. You’ve now reached your monthly limit of premium content. Register for free to unlock unlimited access to all of our premium content, as well as the latest technology news, industry opinion and special reports.
Benefits of registering
-
In-depth insights and coverage of key emerging trends
-
Unrestricted access to special reports throughout the year
-
Daily technology news delivered straight to your inbox



Water Sector Talent Exodus Could Cripple The Sector
Maybe if things are essential for the running of a country and we want to pay a fair price we should be running these utilities on a not for profit...