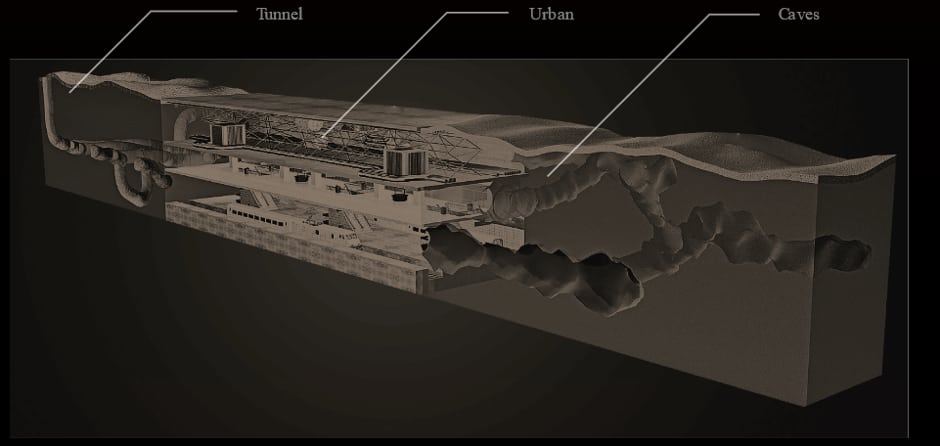
Modular robots being developed to navigate tunnels and caves
A team from Carnegie Mellon University is developing a robotic system that autonomously searches tunnels, caves and underground structures.
The project is being entered into the US Defense Advanced Research Projects Agency’s Subterranean Challenge, a multi-year robotics competition with a $2m prize.
The Carnegie Mellon team is one of six teams that will receive up to $4.5m from DARPA to develop the robotic platforms, sensors and software necessary to accomplish complex underground missions.
According to CMU, the robots will be tasked with rapidly mapping, exploring and exploiting underground environments that range from spaces that humans can only crawl through, to areas big enough to accommodate an all-terrain vehicle.
The challenge is designed to provide armed forces and emergency services with the capabilities they need to accomplish a variety of missions in caves, tunnels or underground facilities in towns and cities.
“Successfully completing these missions will require multiple robots, including both drones and ground vehicles,” said Sebastian Scherer, who will lead the team with Matt Travers, both of CMU’s Robotics Institute. “Our team has a wealth of experience in operating robots in mines, enclosed spaces and the wild, and in coordinating the activity of multiple robots.”
Register now to continue reading
Thanks for visiting The Engineer. You’ve now reached your monthly limit of news stories. Register for free to unlock unlimited access to all of our news coverage, as well as premium content including opinion, in-depth features and special reports.
Benefits of registering
-
In-depth insights and coverage of key emerging trends
-
Unrestricted access to special reports throughout the year
-
Daily technology news delivered straight to your inbox



Water Sector Talent Exodus Could Cripple The Sector
Well let´s do a little experiment. My last (10.4.25) half-yearly water/waste water bill from Severn Trent was £98.29. How much does not-for-profit Dŵr...