Swarm robots made safer and more reliable with automatic programming
Automatically programming swarms of robots to carry out tasks simultaneously could improve their safety and reliability, by significantly reducing the number of bugs in their software caused by human error.

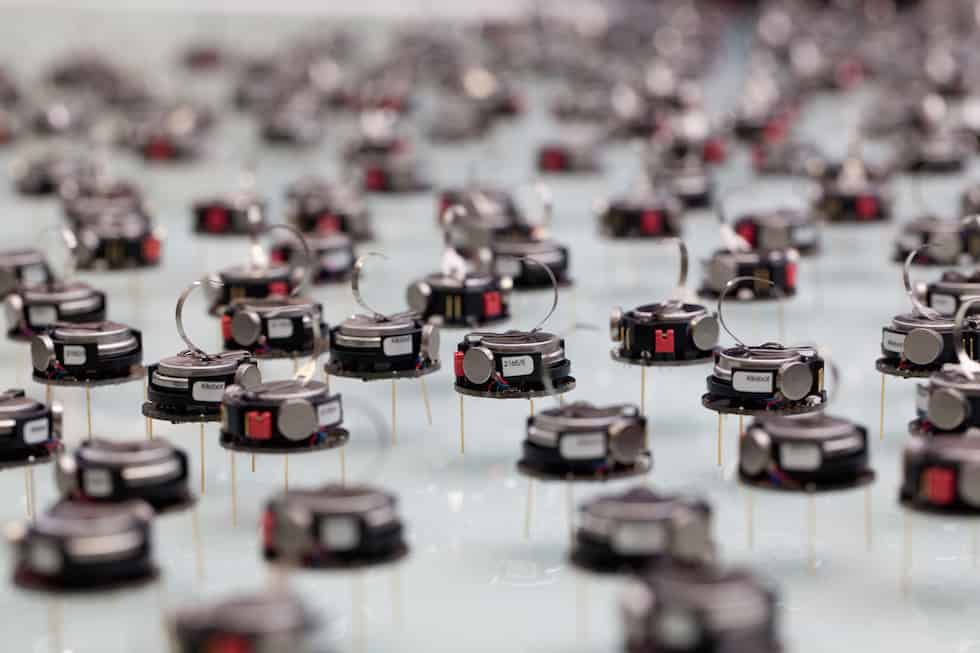
Swarms of robots capable of communicating with each other to carry out complex tasks cooperatively are expected to become increasingly important in the future, in fields such as manufacturing and agriculture.
Autonomous cars will also need to be able to cooperate with one another, while observing their own rules of operation, in order to safely navigate the road network.
But glitches caused by human error during programming are a common feature of computing, with the global cost of debugging software estimated at around $312bn each year.
Researchers at Sheffield Robotics have now developed a technique that allows human users to input the task they would like the robots to carry out into a graphical tool, alongside details of what the robots are physically capable of doing.
The machine then automatically programmes these instructions, and translates them into a source code that can be used to control the robots, according to Dr Roderich Gross at Sheffield University, who led the EPSRC-funded research.
Register now to continue reading
Thanks for visiting The Engineer. You’ve now reached your monthly limit of news stories. Register for free to unlock unlimited access to all of our news coverage, as well as premium content including opinion, in-depth features and special reports.
Benefits of registering
-
In-depth insights and coverage of key emerging trends
-
Unrestricted access to special reports throughout the year
-
Daily technology news delivered straight to your inbox



Water Sector Talent Exodus Could Cripple The Sector
Well let´s do a little experiment. My last (10.4.25) half-yearly water/waste water bill from Severn Trent was £98.29. How much does not-for-profit Dŵr...