
Jesse Santos, Product Application Engineer, Angelo Nikko Catapang, Product Application Engineer, and Erbe D. Reyta, Hardware Application Engineer, all with Analog Devices
Abstract
Earthquakes pose a major threat for condensed commercial and residential areas and for all types of structures. As these areas grow larger and as more buildings are constructed, seismic monitoring requires the implementation of a widespread sensor network. Traditional instruments are not viable due to high cost and complexity. The use of microelectromechanical system (MEMS) accelerometers and rugged small-sized geophones enable the development of a low cost Internet of Things (IoT) solution. Current technology in active components and converters allows these sensors to reach the modern instrument standards. AnalogDevices provides a simple but reliable instrument design solution for seismic sensor network applications.
Introduction
As the world grows more interconnected and interdependent, moderate and large earthquakes have the potential to cause significant economic disruption and loss. A major earthquake in any vulnerable urban centre will have a ripple effect on that centre’s national economy and on the ability of its businesses to provide services and participate globally.(1) Recognising that earthquake risk is a global problem, improving seismic monitoring to mitigate this risk is a crucial responsibility.
One key factor to the improvement of seismic monitoring is the implementation of a seismic sensor network, which requires the widespread deployment and interconnection of seismic instruments.(2) However, the cost and complexity of installing numerous traditional seismic instruments are high.(3) Integrating IoT technology provides a low cost solution while maintaining standard seismic data quality.(4) This article discusses the physics of earthquakes and ground motion sensors, the modern instrument standards followed and the features they extract. Furthermore, a system design using Analog Devices solutions is developed for different seismic sensor network applications.
Earthquake
An earthquake is an event that is caused by the movements and collisions of tectonic plates. The energy generated from thecollisions propagates through and around the surface of the earth as seismic waves. These waves come in multiple directions andare categorised as body waves and surface waves.
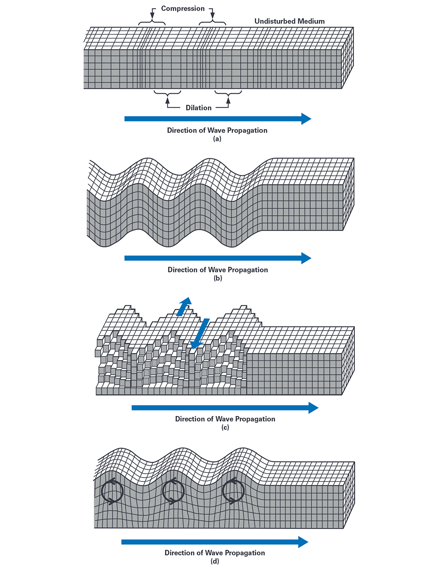
Figure 1. Types of seismic waves: (a) primary waves; (b) secondary waves; (c) Love waves; (d) Rayleigh waves.(5)
There are two types of body waves: primary waves (P-waves) and secondary waves (S-waves). P-waves travel along the direction of propagation as a series of compressions and rarefactions. Due to their nature of propagation, they follow spherical divergence. Although they have the largest decay in wave energy among other types of waves, they are the fastest, having speeds in the rangeof 5km/s to 8km/s. The fast energy decay also makes them the least destructive type of wave. P-waves can travel not only through the surface, but also through water or fluids.
S-waves, also called shear waves, follow right after the arrival of P-waves. They travel along the surface of the earth at a rate of about 60% to 70% of P-waves. This type of wave travels orthogonally of both the direction of propagation and the Earth’s surface. S-waves are more destructive than P-waves because of their lower energy decay. P-waves and S-waves are collectively known as body waves.
Surface waves are 10% slower than body waves, but they are the most destructive. It is worth noting that the propagation velocity of seismic waves varies widely depending on the type of soil they are travelling in.(6) Surface waves are composed of Rayleigh and Love waves. Rayleigh waves are a type of surface wave that propagate near the Earth’s surface as ripples and cause a rotation that can be either prograde (along the direction of propagation) or retrograde (against the direction of propagation). They are also called ground roll due to the nature of their movement. Love waves, on the other hand, travel orthogonally with the direction of propagation but parallel with the surface of the Earth. Figure 1 shows the different types of waves and their effect on the Earth’s body.
Magnitude, Intensity, and Spectral Intensity
Earthquake magnitude and earthquake intensity are commonly mistaken for one another. They may be related, but they are measurements of two different earthquake parameters.
Earthquake Intensity
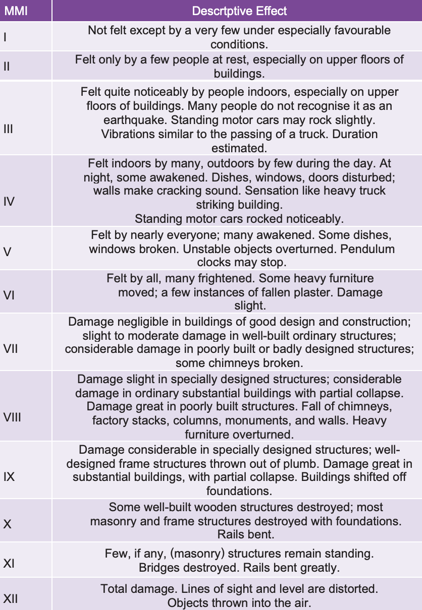
Earthquake intensity, or simply intensity, is highly dependent on the properties of the location where the measurement was taken. It describes the effect of an earthquake on a specific area and has been traditionally used worldwide as a method for quantifying the shaking pattern and the extent of the damage. Hence, earthquake intensity does not have one true value. Earthquake intensity values follow either the Modified Mercalli Intensity Scale (1 to 12) or the Rossi-Forel Scale (1 to 10). However, the Modified MercalliIntensity (MMI) is now dominantly used worldwide. Table 1 shows intensity values with their corresponding descriptive effect in the modified Mercalli scale given by the United States Geological Survey (USGS).
Table 1. Abbreviated Modified Mercalli Intensity Scale
There have been numerous methods to determine the intensity of an earthquake.7 These methods used data gathered from past earthquakes and created their own ground motion prediction equations (GMPEs) to predict the intensity values. The equations that were derived use at least one, or a combination of, ground motion parameters - namely peak ground displacement (PGD), peak ground velocity (PGV), and peak ground acceleration (PGA). Earlier equations were primarily based on PGA with a few cases that used PGV and PGD. Even though the GMPEs used data from multipledatabases to develop the correlation, the values obtained by different models still vary significantly. For example, a PGA value of 10cm/s2 using Wald’s GMPE results in an MMI value of 3.2. Alternatively, Hershberger’s GMPE categorises a 10cm/s2 PGA value to an MMI value of 4.43. Note that the majority of the GMPEs observe the power law, so an exponential increase in PGA value is required for a step increase in MMI value. Equation 1 shows the correlation equations created by Wald and Hershberger.
Equation 1 displays ground motion prediction equations: (a) Wald; (b). Hershberger.(8)
![]()
The Japan Meteorological Agency (JMA) has devised a seismic intensity scale, which can be computed from strong motion three axes acceleration data.9 The Fourier transform of the acceleration time-signal from each axis is taken. A band-pass filter, shown in Figure 2 and consisting of a period-effect, high-cut and low-cut filters, is applied to the frequency signal of each axis. The mathematical representation of each sub-filter is also shown.
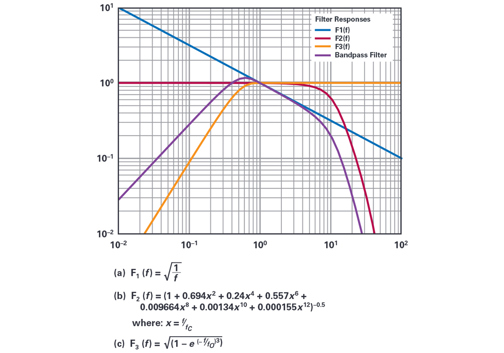
Figure 2. Band-pass filter for accelerometer output signal used in calculating JMA intensity: (a) period effect filter equation; (b) high-cut filter equation; (c) low-cut filter equation.(9)
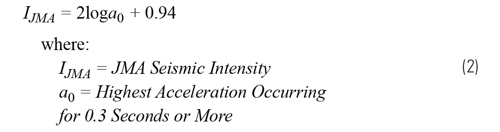
After taking the inverse Fourier transform of the filtered frequency signal of each axis, the magnitude of the vector sum of the resulting time-domain signal for all three axes is computed. The highest acceleration value that occurs for an accumulated total of 0.3 seconds or more is designated as a0. The instrumental seismic intensity is then calculated from a0 using Equation 2, which examines the JMA seismic intensity equation using the highest acceleration with a duration of at least 0.3 seconds.(9)
Earthquake Spectral Intensity
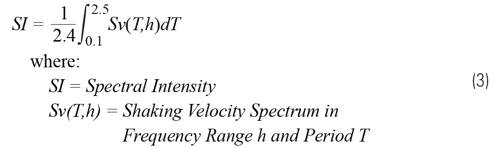
While an earthquake’s intensity is dependent on its effect as felt on a certain location, spectral intensity (SI) is a measure of the magnitude of destructive energy imposed by the earthquake on a specific structure.10 The SI value is calculated from the velocity response spectrum using the equation shown in Equation 3. Highly rigid structures have a velocity normal period of 1.5s to 2.5s. Since the SI value operates over the shaking velocity spectrum, it can easily distinguish seismic activities from earthquakes or from other sources. Thus, the SI value can be used as a standard of earthquake effect on a building’s structural health. Furthermore, compared to the JMA seismic intensity, the SI value involves a less complex computation, which makes it more suitable for low power applications.
Equation 3 displays the spectral intensity equation using the shaking velocity response spectrum integrated over the normal velocity period of a building.
Earthquake Magnitude
Earthquake magnitude, or simply magnitude, represents the amount of energy released by the earthquake at its source or hypocentre. Its value does not depend on the location of measurement. In fact, it has only one true value, an assigned number in the Richter scale. The strongest earthquake that has ever been recorded was the earthquake that struck Valdivia, Chile in the 1960s with a magnitude of 9.4 to 9.6.
Correlation between earthquake magnitude and intensity has not yet been fully defined. Creating a definite relationship between the two depends on a lot of factors, such as the depth of the hypocentre or focus, the composition of the ground surrounding the hypocentre, the type of terrain between the epicentre and measuring device, and the device location or its distance from the epicentre. For example, in May 2017, an earthquakethat originated near the coast of Oregon was determined to have a magnitude of 4. According to the USGS shake map for July 2017,(12) the state of Montana felt the earthquake with an intensity level of 5 to 6, while Idaho had felt the same earthquake with only an intensity level of 2 to 3. This shows that even if Idaho is closer to the epicentre as compared to Montana, it does not necessarily mean that the earthquake’s effect will be feltstronger.
Seismic Sensing
Seismic sensing is the process of measuring and analysing seismic waves. Seismic waves do not only refer to the motions generated by earthquakes; any force applied to the ground, even as light as walking, can cause a disturbance enough to generate seismic waves. The range of ground motion that is of interest in earthquake monitoring applications is very large. Earthquakes can generate ground motions as thin as paper or astall as a room.
Ground motion can be characterised by displacement, velocity, and acceleration. Ground displacement is measured by the distance travelled by the Earth’s surface. The change in position can be either horizontal or vertical. Ground velocity is how far the surface has been moved, whereas ground acceleration is how fast the ground velocity is changing with respect to time. Ground acceleration is the most important factor in determining the stress induced to structures during earthquakes. The relationship between magnitude, ground motion, and intensity is shown in a presentation by GeoSIG.(13)
The devices used for seismic sensing are very application specific. Applications that involve seismic sensing can be categorised based on their frequency ranges. Instruments are therefore made with frequency response curves appropriate to their use case. An illustration of different seismic sensing applications and their covered frequencies is shown in a chart by GeoSIG.(13)
Overview of Modern Seismometers and Ground Sensors
Seismic sensing devices, commonly called seismometers, have evolved from using the traditional pen and pendulum to the use of electronic and electromechanical sensors. Advances in the design of these sensors have resulted in instruments with varied operating frequency ranges, sensing mechanisms, and measured ground motion parameters.
Strain Seismometers
Historical seismic instruments can only record ground displacement. Technology advancements have made it possible for different mechanisms in measuring ground displacement. A strain seismometer or strain meter generally refers to instruments that record and measure the displacement between two ground points.(14) Traditional models used a solid rod buried or installed in a borehole. The rod is usually infused with quarts and other materials highly sensitive to changes in length and strain. The change in length is attributed to small displacements caused by ground motion.
Another type of implementation is called the volumetric strain meter, which uses a borehole-installed cylinder with a liquid-filled tube.(15) Deformations of the container volume causes changes in the liquid level, which is translated by voltage displacement transducers to ground displacement. Without the need for special materials required by traditional models, the volumetric strain meter is more widely used in the field.
Current advances in laser technology has produced the laser interferometer, which greatly extends the accuracy of strain meters in general. This typeof strain meter uses the same principle of an unequal arm length Michelson interferometer, where one point is the sensor, laser source, and shortarm; and the other point is a reflector situated a measuring distance away. The device translates the change in the interference fringes caused by the movement of the reflector to ground displacement. The sensitivity and accuracy of the displacement measurement by this approach is directlyproportional to the length of the measuring distance. Thus, laser strain meters require very deep underground installations.
The precision of strain meters can reach up to one part per billion. As such, these devices are usually used to measure the deformation of the Earth or crustal movement due to fault movement and volcanic activities. They can measure seismic wave signals at very low frequencies. However,differential ground movement is very small when compared to the motion of a suspended mass relative to the ground. Thus, strain meters are not recommended for sensing ground motions caused by earthquakes.(3)
Inertial Seismometers
The inertial seismometer determines ground motion parameters with respect to an inertial reference, which is typically a suspended mass.(3) Specifically, ground motion parameters refer to the linear velocity and displacement of the suspended mass. Although resultant ground motion iscomposed of both its linear and angular components, the rotational effect from a seismic wave has been found to be negligible. These velocity anddisplacement values are obtained from transducers, which convert the movement of the suspended mass into electrical signals. The mechanical suspension that governs the movement is dependent on the inertial force acting on the suspended mass. The velocity and displacement transducers,and the mechanical suspension are the two main components of inertial seismometers. The development of precision instruments for these two components are the main design principles of modern inertial seismometers.
Force-Balanced Accelerometers
The mechanical suspension requires a small restoring force for sensitivity such that small accelerations can still produce significant displacements on the suspended mass. However, when large accelerations from strong seismic motion are applied to the suspended mass, a small restoring force will not be able to balance the resulting movement. Thus, a passive mechanical suspension is precise and sensitive only to a limited range of ground accelerations. The force-balanced accelerometer (FBA) removes this limitation by adding a negative feedback loop to the mechanical suspension.
A compensating force is generated by an electromagnetic transducer based on the position of the suspended mass. This position is converted by a displacement transducer to an electrical signal that passes an integrator block to produce an output voltage proportional to ground acceleration.The dynamic range of an FBA is significantly greater than seismometers with passive mechanical suspensions. Thus, this device is commonly used for strong motion seismic applications. However, the delay caused by the feedback loop limits the bandwidth of the device.
Velocity Broadband (VBB) Seismometers
Seismic waves from vehicular movement and man-made disturbances, such as mining events, have high frequency ground acceleration. At very low frequencies, an imbalanced suspension, ground tilt, and thermal effects will dominate ground acceleration. Thus, the bandwidth for seismometers using ground acceleration is limited to a specific band-pass response. A band-pass response of ground acceleration is equivalent to a high-pass response of ground velocity. Thus, for wider seismometer bandwidth, seismic signals are recorded in terms of ground velocity. The VBB seismometer is based on an FBA, but instead of passing the acceleration of the suspended mass as feedback, its velocity and position are used. The response of this device is very similar to the theoretical response of a traditional inertial seismometer, but without the decrease in sensitivity and precision for a wider range of forces.
Geophones and Microelectromechanical System (MEMS) Accelerometers
The trend for the increasing number of seismic applications is directed toward the development of seismometer or seismic sensor networks and arrays, such as in earthquake monitoring, oil exploration, and structural health. Seismometer implementation, shielding, and installation are three common constraints for these applications. Mass production and rapid deployment of devices, which directly solve these three common constraints, require seismometers to be scaled down in size and cost. Currently, there are two types of sensor technologies capable of ground motion sensing, which are extremely small and low cost when compared to FBAs and VBBs.
Geophones
Geophones are ground velocity sensors that are lightweight, robust, and require no electrical power to operate. Modern geophones have a magnet fixed to the case and surrounded by a coil of wire.(16) The coil of wire is suspended by springs that allow it to move across the magnet. The velocity of this movement relative to the magnet induces an output voltage signal.
Shown in Figure 3 is the simulated frequency response of a 4.5Hz geophone. The frequency response of a geophone is flat in velocity for a range of frequencies above its resonant frequency and diminishing for frequencies below this. Small-sized and low cost geophones have resonantfrequencies typically above 4.5Hz.

Figure 3. Simulated 4.5Hz geophone frequency response with a damping factor of 0.56.
An equivalent electrical model can be created from the mechanical specifications of the geophone. Figure 4 shows an electrical model using the mechanical parameters of a SM-6 4.5Hz geophone.(17)
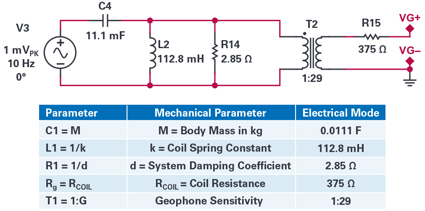
Figure 4. Equivalent electrical model of a SM-6 4.5Hz geophone using mechanical parameters from the product data sheet.(17)
To extend the bandwidth to cover the lower frequencies applicable to seismic sensing, a period extender is used. The three most common methods of low frequency response extension are inverse filters, positive feedback, and negative feedback.(18)
Inverse Filters
The inverse filter compensates the geophone’s roll-off at frequencies below the resonant frequency. An inverse filter can be constructed by cascading an inverted high-pass filter at the resonant frequency and a low-pass filter with a cut-off frequency at the desired lowered value. Figure 5 shows the response of the inverse filter, as well as the resulting transfer function when it is applied. This method has many disadvantages that give the overall result a low signal-to-noise ratio (SNR). Pink noise will be amplified by the inverse filter, and its thermal stability at low frequencies is poor.
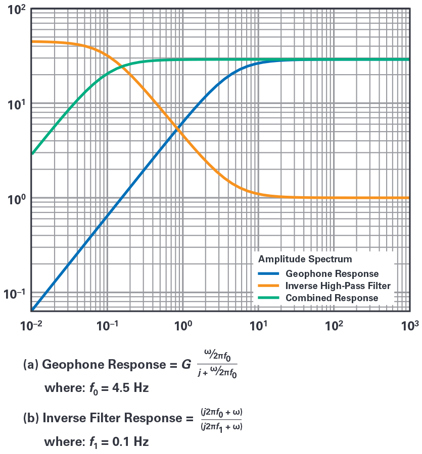
Figure 5. Frequency response of an inverse filter transfer function and its effects on a simulated 4.5Hz geophone frequency response.
Positive Feedback
Positive feedback is done by feeding an external current to the geophone coil that would exert a force on its suspended mass. This external current signal is derived from the geophone’s output signal through positive feedback filters, such as the integrating filter, and amplify the suspended massmovement at low frequencies. Stability of the design of the positive feedback filter is difficult in practical situations.
Negative Feedback
Negative feedback, as opposed to positive feedback, attenuates the suspended mass movement inside. One method would be to overdamp thecurrent through the geophone coil by reducing the damping resistance. However, this is physically limited by the coil resistance. To reduce the damping resistance to values significantly lower than the coil resistance, a negative resistance is added. A negative resistor can be achieved through active devices as a negative impedance converter (NIC). This can be implemented using an operational amplifier (op amp) as shown in Figure 6. Band-pass filters and high gain filters can be added to shape and stabilise the frequency response.
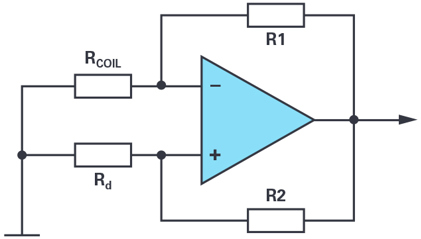
Figure 6. Basic architecture of a negative impedance converter using an op amp.
MEMS Accelerometers
MEMS accelerometers are motion transducers in a single IC device package. The typical construction uses a pair of capacitors with a micromass ofsilicon with metal plates in the middle.(19) Very thin regions of silicon suspend the mass in the middle. Changes in the position of the mass result in changes to the device capacitance that translate to a voltage signal proportional to the acceleration of the suspended mass. MEMS devices require a power supply to operate, and some MEMS accelerometers have a built-in digitiser to eliminate the unnecessary noise, as well as the need to match sensors and recorders. As shown in Figure 6, the frequency response of a MEMS accelerometer is like a low-pass filter with a cut-off at the resonantfrequency.
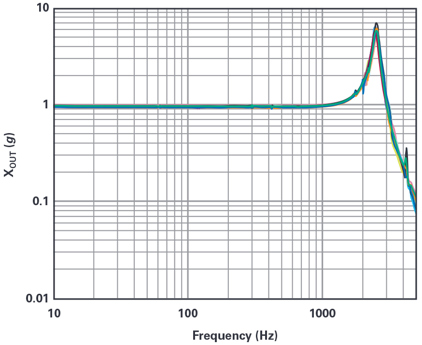
Figure 7. Frequency response of a MEMS accelerometer (ADXL354) on its X-axis.(20)
Due to offset drifts, MEMS accelerometers perform better at higher frequencies up until their resonant frequency.(21) Conversely, geophones, due to their mechanical construction, perform better at lower frequencies that are still above resonance. A small, low cost seismometer can be implemented to utilise both geophones and MEMS accelerometers to achieve a higher device bandwidth. The sensor output of geophones and MEMS accelerometers can be converted to different ground motion parameters when convolved with the appropriate sensor transfer function. The paper “Seismic Sensing: Comparison of Geophones and Accelerometers Using Laboratory and Field Data” discusses the geophone and MEMSaccelerometer sensor outputs for the same ground displacement Ricker wavelet based on the common transfer functions of each sensor.(21)
Seismic Sensor Instrument Guidelines
Seismic signal analysis using seismometer arrays or seismic sensor networks requires, for repeatability and uniformity, a set of standards and specifications on the instruments used. The USGS has set a standard for instruments to be deployed in their Advanced National Seismic System (ANSS).(22) This section discusses the different specifications required to achieve the desired device performance for a wide range of applications based on experience and technological trends noted by the USGS.
Data Acquisition System (DAS) Standards
Modern seismometers are classified by the USGS as data acquisition systems. In contrast to the traditional seismometer, standard DAS include the seismic sensor, the data acquisition unit, and the peripheral and communication hardware. They are categorised into Class A, B, C, and D instruments based on the device performance. Class A instruments are near state-of-the-art seismometers while Class D instruments are comparable to traditional seismometers. For a complete discussion of the specifications, see the Instrument Guidelines.(22)
Instrument Bandwidth
The specified bandwidth and frequency response of seismic sensors differ for those measuring velocity and acceleration. The higher the instrumentclass, the wider the bandwidth and better the frequency response. Broadband sensors are all Class A instruments with a wide bandwidth of at least0.01Hz to 50Hz. Their frequency response is flat for velocity in the frequency range of 0.033Hz to 50Hz.(22)
Short period Class A sensors have low bandwidth at 0.2Hz to 50Hz. Their frequency response is flat for velocity only in the frequency range of 1Hzto 35Hz.(22)
Class A accelerometers have a flat frequency response in the range of 0.02Hz to 50Hz, while Class B accelerometers have a flat frequency response inthe range of 0.1Hz to 35Hz only.(22)
Strong Motion, Weak Motion, and Broadband Sensors
Sensors used by DAS are classified by the amplitude and frequency range of the seismic signals they capture. Strong motion sensors measure large amplitude seismic signals and are usually accelerometers. Strong motion accelerometers can measure up to 3.5g with a system noise level less than 1μg/√Hz.(22)
Weak motion sensors can measure very low amplitude seismic signals with a noise level of less than 1ng/√Hz.(22) However, broadband sensors are already capable of measuring low amplitude seismic signals; hence, weak motion sensors are rarely used.
Sensor Dynamic Range and Clip-Level
Broadband velocity sensors have a sensitivity of 1500Vs/m. For a maximum output voltage of ±20V, the output clip-level or the maximum measurable velocity is ±0.013m/s.(22)
Short period velocity sensors are more sensitive than broadband sensors at a smaller range of frequencies. The clip-level is typically ±0.01m/s at 1Hz signal frequency.(22)
The clip-level for Class A accelerometers is greater than ±3.5g while for Class B accelerometers, it is ±2.5g.(22)
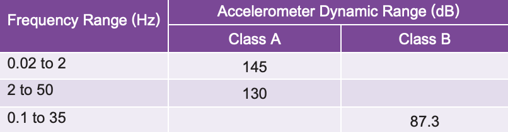
The sensor dynamic range is the ratio of the largest measurable rms value of the seismic signal to the rms self-noise. However, the rms self-noise of the sensor varies along its bandwidth. Table 2 shows the dynamic range of different seismic sensors for different frequency ranges.
Table 2. Dynamic Range of Difference Sensor Types: Broadband Sensor
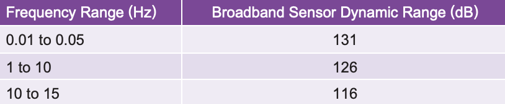
Table 3. Dynamic Range of Difference Sensor Types: Short Period Sensor

Table 4. Dynamic Range of Difference Sensor Types: Accelerometer
Sensor Channels and Orientation
Linear ground motion components resulting from seismic waves are present in all three Cartesian axes. The traditional standard orientation for tri-axial seismic sensors is toward the East, North, and upward direction. However, the construction of traditional and even some modern seismometers is different for horizontal and vertical sensors since vertical sensors must consider gravitational effects. The homogenous tri-axialarrangement allows for similarly constructed sensors to be used to determine the linear ground motion components in the Cartesian axes.(3) The sensors are positioned at three equally spaced points in a circle around the centre of the instrument and inclined toward it at an angle of 54.7˚ from the vertical. The modified set of axes can be transformed back to the Cartesian axes using the equation shown in Equation 4.
Equation 4 demonstrates the transformation matrix to convert the homogenous tri-axial arrangement to the Cartesian coordinate system.

Most modern sensors, however, are already packaged and constructed for tri-axial measurements. These sensors have inherent cross-axis coupling at very small degrees. The instrument guidelines require cross-axis coupling to be less than –70dB of the output signal.(22)
Resolution and Sampling Rate
Ground motion resulting from earthquakes can have very small amplitudes at very low frequencies. Data loggers used for seismic instruments are capable of recording signals at various sampling rates at high resolutions. Broadband seismometers require at least 20-bit data resolution at sampling rates as low as 0.1 samples per second (SPS) up to 200SPS. Short period velocity sensors and Class A accelerometers require at least 22-bit data resolution at sampling rates of 1SPS to 200SPS. Class B accelerometers have lower requirements for resolution of at least 16 bits of data.(22)
The specifications for sampling rates take into consideration instruments with internal data storage. However, advanced seismometers are equipped with more memory space and have access to large network data spaces, such as cloud data services, and thus can support sampling rates that exceed the rated specification. This allows for more accurate data analysis and seismic research.
Timing and Location Information
Seismic signals are only relevant to the specific location and time of measurement. It is the standard for every seismic instrument to have time-stamped data with a known global location or position. It is a requirement for every seismic instrument to be able to affix its location for every recording, either through manual user input or through a global positioning system (GPS) device or service. Modern seismometers also have either a built-in real-time clock or can sync to an accurate reference time such as via an online network time protocol (NTP) server.
Output Data Format
There are two prominent data formats used by seismic instruments worldwide, SEG-Y and SEED. The SEG-Y format is an open standard developed by the Society of Exploration Geophysicists (SEG) to handle geophysical data such as three-dimensional seismic signals.(23) Included in each record are the timestamps, sample intervals, and location in coordinates of the actual measurement. Details on the specifications of the format as well as the revisions can be viewed on the organisational website. It is also worth noting that there are various open-source software for seismicanalysis that use the SEG-Y format, but most do not follow the exact specifications.
The Standard for the Exchange of Earthquake Data (SEED) format was designed for the ease and accuracy of the exchange of unprocessed seismic data between institutions and between instruments.(24) Although it is primarily used for archiving seismic records, different versions of SEED, such as the miniSEED and data less SEED, have been used for data analysis and processing. MiniSEED contains only the waveform data, while the data less SEED contains the information about the seismic instrument and station.
Analog Devices System Design
Changes in the traditional seismometer design are necessary for the rapid deployment and implementation of seismic networks, especially for urban and structural monitoring stations. Remote instruments need to comply with the current instrument guidelines so that the modern seismic signal measurements will conform and correlate to the established data standard. However, the cost and size of the implementation should be significantly smaller. The use of small-sized geophones and MEMS accelerometers as ground motion sensors coupled with a high performance ADC and digital signal processor (DSP) is a reasonable solution.(5)
Analogue-to-Digital Converter (ADC) Considerations
The primary design consideration of a data acquisition unit (DAU) for a DAS is the analogue-to-digital converter (ADC). Traditionally, this was performed by a digital field system (DFS), which functions as a linear successive approximation register (SAR) ADC with an instantaneous floating-point (IFP) amplifier. Shown in Figure 8 is the block diagram of a traditional DFS.

Figure 8. Block diagram of a traditional DFS using an IFP amplifier system.
The discrete implementation of the preamplifier (PA), low-cut (LC), high-pass filter, notch filter (NF), anti-aliasing (AA) high-pass filter, and the IFP amplifier will contribute to the system noise and add to the power consumption. The use of a multiplexer adds switching, cross-talk, and harmonic distortion. Most importantly, the quantisation error due to the SAR ADC limits the dynamic range and resolution of the system.(25) Thus, it is preferable to design a DAU using a different architecture with a different converter.
Sigma-Delta (∑-Δ) Converters
The sigma-delta converter uses the change in the signal and adds it to the original. This reduces the quantisation error inherent in SAR ADCs and can achieve higher resolutions and dynamic ranges. With modern sigma-delta ADCs, discrete implementations in the signal conditioning filters areno longer necessary. They feature extensive and configurable digital filters, which perform the functions of the traditional signal chain. This effectivelylowers the system noise and design complexity. Furthermore, high-end precision sigma-delta ADCs are capable of simultaneous sensing of multiplechannels with at least 24-bit resolution.
Modern DAS Design Using Analog Devices Solutions
A general block diagram for a low cost implementation of a seismic sensor node that is flexible for different applications is presented in Figure 9.
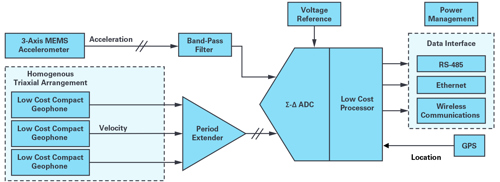
Figure 9. General block diagram of a low cost seismic instrument with three homogenous tri-axially arranged geophones and a three-axis MEMS accelerometer.
Analog Devices solutions for three-axis accelerometers capable of seismic imaging are ADXL354 and ADXL356. Their digital output equivalents,ADXL355 and ADXL357, respectively, have integrated 20-bit ADCs and can be interfaced directly by the processor.(20)
Low cost compact geophones sense only a single channel at a resonant frequency typically greater than 4.5Hz and a sensitivity greater than 25V/m/s. The homogenous tri-axial arrangement allows for three similar single-channel geophones to be combined into a three-axis ground sensor. A period extender is required to extend the geophone bandwidth downward to achieve the standard instrument specification for broadband sensors. When designed for single-supply operation, the period extender also functions as a gain amplifier and sets the bias of the input signal to be at the centre of the ADC range.
The inherent frequency response of MEMS accelerometers makes them vulnerable to offset drifts and high frequency noise. Band-pass filters improve the acceleration signal in the frequency range of interest to local seismology. Both the geo phone period extender and the accelerometer band-pass filter require low noise, low offset voltage, and low input bias-current precision op amps such as the ADA4610-1.(26)
The voltage reference sets the measurement range of the ADC and the output signal swing of the period extender. The reference value should also consider the voltage swing of the three acceleration signals if an analogue output sensor is used. It is necessary that the voltage reference has a very low offset drift with temperature especially for outdoor installations (typically at 0˚C to 50˚C). The Analog Devices’ ADR45xx family of ultralow noise and high accuracy voltage references are industry standard and can easily achieve these requirements.(27)
The power supply of the seismic sensor can be sourced from a wired dc power converter for installations with available power lines, such as in buildings and stations, or from a battery for remote and field installations. When sourcing from a wired dc power converter, low noise switching regulators and low noise, low dropout (LDO) regulators are suitable for the application. Analog Devices LDO regulators, such as the ADM717x series, offer high power supply rejection ratio (PSRR), low temperature drift, and low noise features.(28) For battery-powered designs, a load efficient and low power charge controller and battery charger are required to sustain the operation of the instrument for long periods without maintenance. Moreover, it is better if the instrument is capable of energy harvesting from easily available sources such as solar and thermal power. The ADP5091 ultra low power energy harvester has maximum power point tracking and hysteresis modes, which ensure the highest possible efficiency in energy transfer.(29) It has power path management features that can switch between the harvester, a rechargeable battery, or a primary cell battery, which makes it reliable for operating self-powered instruments.
The sigma-delta converter takes in three channel velocity signals from the period extender and another three channel acceleration signals if ananalogue output accelerometer is used. The design requires a converter with at least six input channels. Velocity and acceleration signals need to be sampled, if possible, simultaneously. For multichannel ADCs that switch between channels when sampling, the sampling rate would need to be higher. The maximum frequency of seismic signals of interest to earthquakes are at 100Hz. The sampling frequency without aliasing for these signalsshould be at least 200Hz or 5ms per period. Each acceleration and velocity channel should be sampled with at least 1.2kSPS sampling rate. The analysis of seismic signals promotes the oversampling of each channel. Therefore, the ADC should be chosen to have a sampling rate muchhigher than 1.2 kSPS. The AD7768 is an 8-channel, 24-bit sigma-delta ADC capable of simultaneous sampling, which removes the need for higher sampling rates.(30) Its maximum sampling rate is 256kSPS; however, it can scale down to low power mode up to 32kSPS. It is flexible enough for different implementations and applications of this seismic instrument design and easily achieves the standard requirements for a Class A data acquisition unit.
The function of the low cost processor varies with the application. For remote nodes that use an external computing device for data analysis, the processor is a data logger that stores and packs the seismic data of all channels to the standard format (SEED or SEG-Y) and sends them to the computing device via a data interface. Since this application has a low processing requirement, it is possible to use a low power microcontroller. The ADuCM4050 is an ultra low power ARM® Cortex®-M4 microcontroller recommended for IoT applications.(31) It has low power modes at 650nA for hibernate mode and 200nA for a fast wake-up shutdown mode. Additionally, it has two real-time clock (RTC) peripherals for time-keeping and time-synchronised data sampling.
For standalone instruments with built-in data analysis, a DSP computes for seismic features and other parameters dependent on the application, such as building health indicators for structural health monitoring. Seismic data analysis requires the calculation of various mathematical and statistical functions. For example, the computation of seismic intensity requires logarithmic functions and a peak detection window for acceleration and velocity. Furthermore, the processing time should be low enough to perform continuous data sampling and processing. The ADSP-BF706 is a low cost, low power DSP with up to 400MHz processing speed and is an industry leading choice of DSP for field instrument applications.(32) It offers multiple glueless peripheral interfaces, which makes it easier to connect to external devices such as the data interface and ADC.
The instrument’s location data may either be extracted from a GPS module or manually set during installation. For the time data, the low cost DSP can use either its internal RTC peripheral or via NTP through the data interface. There are multiple options for the data interface depending on thetype of installation. The instrument may use industrial RS-485 for wired communications, especially inside buildings, or an Ethernet interface to easily connect the device to an existing data network. For wireless communications, the instrument may use Wi-Fi devices or the Analog Devices SmartMesh® IP(33) for full data reliability in dynamic environments.
Applications
The reliability of seismic data increases as the number of seismic sensors deployed at various locations increases. There is a lot of information thatcan be extracted from seismic data that is useful for a wide range of applications such as structural health monitoring, geophysical research, oil exploration, and even industrial and household safety. This section discusses general overviews of the three common applications of seismic sensor networks.
Remote Seismic Networks
Volcanology and seismology research deploy seismic sensors in difficult and sometimes dangerous terrain.(34) Monitoring internal processes inside volcanoes requires ground motion to be monitored at multiple points. These locations may become dangerous after certain phases of volcanic activity, and render the seismic sensor to be irretrievable. Low cost, low power seismic sensors will decrease research cost and at the same time remain active for very long periods. Another similar case is the characterisation of plate movement, which also requires a lot of seismic sensors deployed along the fault line.
Earthquake Early Warning System
S-waves and surface waves, which are the more destructive types of seismic waves that are part of an earthquake, propagate slower than the least destructive P-wave. Therefore, it is feasible to implement an earthquake early warning system by detecting the early signs of occurrence. This would give all types of systems a short moment to act and prevent devastating effects due to earthquake damage. Residential and commercial buildings will be able to shut off electrical systems and gas pipelines moments before intense ground shaking occurs. Using a seismic sensor network deployed at several locations around a protected area, will help to increase the allowed reaction time. Also, false alarms caused by non-earthquake sources will be minimized. Figure 10 shows a possible setup for an earthquake early warning system protecting a specific area or structure.
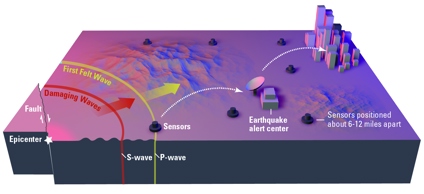
Figure 10. Earthquake early warning system using seismic sensor networks deployed at multiple locations 6 miles to 12 miles apart. Image created by Erin Burkett (USGS) and Jeff Goetzen (Orange County Register). Courtesy of the U.S. Geological Survey ShakeAlert Project.35
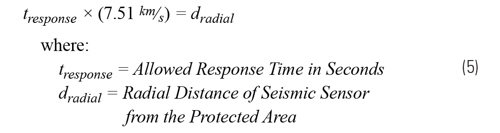
The response time allowed by an early warning system is proportional to the radial distance of the seismic sensor from the protected structure, as described by Equation 5. Given that P-waves travel at 3.5mi/s or 5.6km/s and S-waves travel at 2.0mi/s or 3.2km/s, it can be calculated that one secondof response time is added for every 7.51km distance of the seismic sensor from the protected area. Furthermore, placing multiple seismic sensors atshorter intervals will provide more timing resolution for the response time.
Equation 5 demonstrates the relationship of early warning system response time and radial distance of seismic sensor from the protected area.
Structural Health Monitoring
Earthquake safety of buildings can be improved by monitoring and modelling its response through forced vibration testing. Installing seismic sensors in building will help in post-earthquake damage assessment, response, and recovery. In cases of widespread damage, a widespread seismic sensor network can locate structurally damaged areas, thereby decreasing the risk and cost of visual inspection. A research on strong motion instrumentation applied this to the Atwood building, a 20-story steel MRF building, using 32 accelerometer-based seismic sensors deployed on 10 levels to accurately monitor the structural health of the building.(36)
Conclusion
Seismic sensor networks have a wide range of applications in industrial technology, seismological research, and structural health monitoring. The application demand has changed the sensor and system requirements of seismometers to favour remote systems and low operational costs. Modern, low cost ground sensing technology is now capable of measurements that are on par with traditional instruments. Using the wide range of Analog Devices products, a sensing device can be implemented to cater different seismic sensing applications.
References
1 Hiroo Hanamori, Egill Hauksson, and Thomas Heaton. “Real-Time Seismology and Earthquake Hazard Mitigation.” Nature, No. 390, pp. 461-464, December 1997.
2 “Earthquake Early Warning.” U.S. Geological Survey, 2019.
3 Erhard Wielandt. “Seismometry.” International Handbook of Earthquake and Engineering Seismology, Part A, Elsevier B.V., pp. 283-304, 2002.
4 Ana María Zambrano, Israel Pérez-Llopis, Carlos E. Palau, and Manuel Esteve Domingo. “Technologies of Internet of Things Applied to anEarthquake Early Warning System.” Future Generation Computer Systems, Vol. 75, 2017.
5 Giuseppe Olivadoti, “Sensing, Analyzing, and Acting in the First Moments of an Earthquake.” Analog Dialogue, Vol. 35, January 2001.
6 Ruwan Rajapakse. “Short Course on Seismology.” Pile Design and Construction Rules of Thumb, pp. 241-245, 2016.
7 John Douglas. “Ground Motion Prediction Equations 1964–2019.” University of Strathclyde, August 2019.
Lepolt Linkimer. “Relationship Between Peak Ground Acceleration and Modified Mercalli Intensity in Costa Rica.” The Central American Journal of Geology, Vol. 38, pp. 81-94, 2008.
9 Khosrow T. Shabestari and Fumio Yamazaki. “A Proposal of Instrumental Seismic Intensity Scale Compatible with MMI Evaluated from Three-Component Acceleration Records.” Earthquake Spectra, Vol. 17, No. 4, pp. 711-723, November 2001.
10 “All About Seismic Monitoring Systems.” IMV Corporation, June 2019.
11 Brendon A. Bradley, Misko Cubrinovski, Gregory A. MacRae, and Rajesh
- Dhakal. “Ground-Motions Prediction Equation for SI-Based on Spectral Acceleration Equations.” Bulletin of the Seismological Society of America, GeoScienceWorld, February 2009.
12 “M 5.8 - 11km SE of Lincoln, Montana.” U.S. Gelogoical Survey, July 2017.
13 “Seismic Signals and Sensors.” GeoSIG, September 2009.
14 Neil R. Goulty. “Strainmeters and Tiltmeters in Geophysics.” Tectonophysics, Vol. 34, No. 3-4, pp. 245-256, September 1976.
15 “Monitoring Instruments.” U.S. Geological Survey, 2019.
16 Yong-hui Zhao, Li-ming Wang, and Xiao-ling Yan, “The Principle and Simulation of Moving-Coil Velocity Detector.” 2nd International
Conference on Electrical and Electronics: Techniques and Applications (EETA), 2017.
17 “SM-6 Geophone.” Input/Output, Inc., October 2003.
18 Dieter Stoll. “Seismometer, Extended Response.” Encyclopedia of Earthquake Engineering, Springer-Verlag Berlin Heidelberg, 2015.
19 B. John Merchant. “MEMS Applications in Seismology.” Seismic Instrumentation Technology Symposium. Sandia National Laboratories, November 2009.
20 “Low Noise, Low Drift, Low Power, 3-Axis MEMS Accelerometers: ADXL354/ADXL355.” Analog Devices, Inc., 2016.
21 Michael S. Hons. “Seismic Sensing: Comparison of Geophones and Accelerometers Using Laboratory and Field Data.” University of Calgary, September 2008.
22 Working Group D of the ANSS Technical Integration Committee. “Instrumentation Guidelines for the Advanced National Seismic System.”
U.S. Geological Survey, September 2008.
23 “Seismic Data Format (SEG-Y Format).” U.S. Geological Survey, 2001.
24 Incorporated Research Institutions for Seismology (IRIS). “SEED.” National Science Foundation, 2019.
25 Norman M. Cooper. “Seismic Instruments—What’s New? ... And What’s True?” Recorder, Vol. 21, No. 10, Canadian Society of Exploration Geophysicists, December 2002.
26 “Low Noise, Precision, Rail-to-Rail Output, JFET Single/Dual/Quad Op Amps: ADA4610-1/ADA4610-2/ADA4610-4.” Analog Devices, Inc., June 2019.
27 “Ultralow Noise, High Accuracy Voltage References.” Analog Devices, Inc., December 2018.
28 “6.5 V, 500 mA, Ultralow Noise, High PSRR, Fast Transient Response CMOS LDO: ADM7170.” Analog Devices, Inc., September 2019.
29 “Ultra Low Power Energy Harvester PMUs with MPPT and Charge Management.” Analog Devices, Inc., May 2017.
30 “8-/4-Channel, 24-Bit, Simultaneous Sampling ADCs with Power Scaling, 110.8 kHz BW.” Analog Devices, Inc., July 2018.
31 “Ultra Low Power ARM Cortex-M4F MCU with Integrated Power Management.” Analog Devices, Inc., April 2019.
32 “Blackfin+® Core Embedded Processor: ADSP-BF70x.” Analog Devices, Inc., February 2019.
33 “SmartMesh IP Application Notes.” Analog Devices, Inc., February 2017.
34 Vyacheslav M. Zobin. “Seismic Monitoring of Volcanic Activity and Forecasting of Volcanic Eruptions.” Introduction to Volcanic Seismology (2nd Edition), pp. 407-431, Elsevier, December 2011.
35 Robert de Groot. “ShakeAlert®: An Earthquake Early Warning System for the West Coast of the United States.” ShakeAlert, 2019.
36 Z. Yang, U. Dutta, M. Celebi, H. Liu, N. Biswas, T. Kono, and H. Benz. “Strong-Motion Instrumentation and Structural Response of AtwoodBuilding in Downtown Anchorage, Alaska.” 13th World Conference on Earthquake Engineering, August 2004.
About the Author
Jesse Santos is a product application engineer for the System Development Group based in Cavite. As part of the group, he develops reference designs of system-level solutions for various applications. He joined Analog Devices in 2018. He holds a bachelor’s degree in electronics and communication engineering and is currently a graduate student of De La Salle University-Manila. His research focuses on robotics and artificial intelligence systems, particularly swarm intelligence. He can be reached at jesse.santos@analog.com.
About the Author
Angelo Nikko Catapang is currently a product application engineer for the System Development Group based in Cavite. He works on creating Circuits from the Lab® reference designs. Angelo joined Analog Devices in 2016. He is currently a graduate student of Mapua Institute of Technology taking up M.S. in electronics engineering specialized in control systems. He can be reached at angelo.catapang@analog.com.
About the Author
Erbe D. Reyta has been a hardware application engineer in ADI’s Circuits from the Lab program since 2011 where he has mainly focused on precision system hardware development. He earned his bachelor’s degree in electronics and communications engineering at the University of the Philippines-Diliman and attained his master’s in engineering degree in computer engineering at Pamantasan ng Lungsod ng Maynila (University of the City of Manila) in the Philippines. He can be reached at erbe.reyta@analog.com.



Water Sector Talent Exodus Could Cripple The Sector
Maybe if things are essential for the running of a country and we want to pay a fair price we should be running these utilities on a not for profit...