Nature just does things better than humans. It is a galling fact for engineers, but it is very often true and, in all honesty, not surprising; given millions of years to work on a problem, the random mutations and gradual change of evolution will often find a solution where mere human ingenuity, even assisted by computers, cannot.
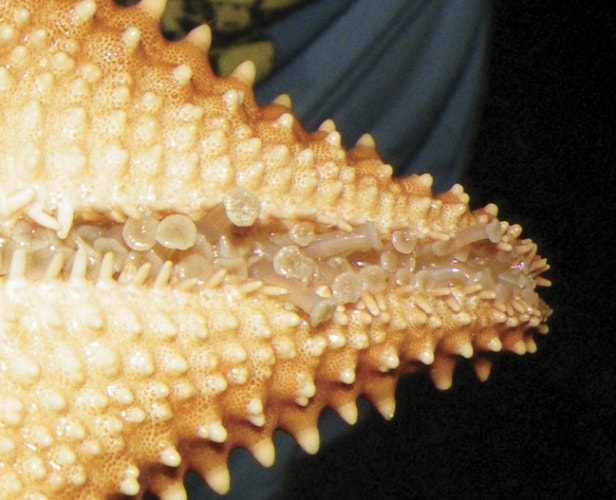
Mimicking nature’s solutions has, therefore, always been a part of the job of an engineer; and robotics, possibly the most important field where engineers try to copy the abilities of living beings, is providing fruitful ground for bioinspired technologies. Investigating nature’s solutions is the preserve of biologists, but their insights into the often surprising and even seemingly perverse ways that organisms achieve what might seem impossible — such as climbing a sheer, smooth surface — can often give engineers ideas for how to solve completely different problems. For example, no starfish has ever tried to lift a pumpkin, but studying how their feet work and allow them to grasp and manoeuvre their limbs over the complex and textured topologies of coral reefs can lead to robots that can handle awkwardly shaped, delicate objects.
George Whitesides of Harvard University is best known as an eminent chemist and author of textbooks, but is currently working on developing bioinspired systems for activities such a grasping and handling. “What we’re doing isn’t biology,” he told a recent meeting at the Royal Society. “For example, the processes – the combination of systems of sensors, muscles and brain [and other organs that process information] – that allow a squid to control its tentacles are still beyond us. All we’re doing is trying to understand the mechanics of a tentacle to the extent that we can mimic some of its characteristics, even if the mechanisms used in that mimicry are unrelated to those used by the squid.”
No starfish has ever tried to lift a pumpkin, but studying how their feet work can lead to robots that can handle awkwardly shaped, delicate objects
Systems based on nature are attractive to engineers for several reasons, Whitesides said. “They tend to work well with humans because their functional parts are frequently soft, so they aren’t as hazardous as heavy industrial machinery with fast-moving metal components. Also, they tend to be simpler, because a lot of the time we replace complex electronic or mechanical control systems by simply making use of the properties of the materials of construction and how we actuate them. That often means they’re relatively cheap, so they can be built for a single use. For example, a soft, bioinspired robot built for the search part of a search and rescue mission – such as for locating survivors of an earthquake in the rubble of collapsed buildings – can just be abandoned in the ruins.”
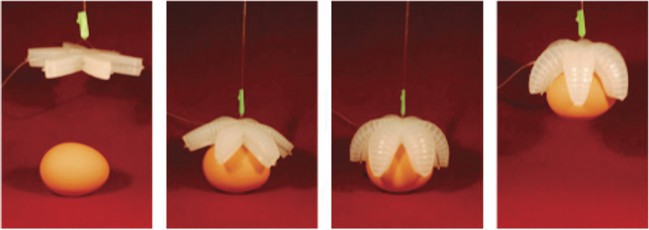
The starting point of Whitesides’ bioinspired work was the starfish, because the star shape was helpful to make a gripper system. “There’s a lot of industrial interest in grippers,” he explained. “Companies such as Amazon are looking for new ways to handle items in their warehouses that have a wide variety of shapes and sizes, so a flexible, versatile gripper that self-modifies to handle the variety of objects is of great interest.”
The body of such robots is made from polydimethylsiloxane, a soft silicone rubber, cast with networks of pneumatic channels and inflatable cells along the fingers. Simply inflating these chambers causes the fingers to curl up. “They curl from the tip towards the root, and that’s not a result of mechanical actuation; just from the structure and property of the material,” Whitesides said. “You can introduce more structure, like less flexible sections along the length of the finger. They’d then act like joints; knuckles in the finger.”
“Companies such as Amazon are looking for new ways to handle items in their warehouses that have a wide variety of shapes and sizes, so a flexible, versatile gripper that self-modifies to handle the variety of objects is of great interest.
George Whitesides, Harvard University
The climbing ability of the gecko has intrigued engineers and scientists since Aristotle, and is the subject of research by Mark Cutkosky, a mechanical engineer from Stanford University. Cutkosky noted that the dry adhesion exhibited by gecko’s feet (sticking to surfaces without any oil or adhesive) is particularly interesting to the space community, because it is one of the few techniques for sticking that works in a vacuum, at low temperatures, on non-magnetic surfaces and requiring low forces to attach and detach items onto surfaces and off them; as such, they are a subject of research for items such as fuel tanks and solar panels. “A few synthetic dry adhesives have even demonstrated levels of adhesion that, for small areas and under controlled conditions, considerably exceed those of the gecko,” Cutkosky said. “However, no synthetic adhesive fully captures the desirable properties of the gecko system for climbing. Perhaps for this reason, although there are many publications on dry adhesives, the number of gecko-inspired climbing robots remains small.”

Cutkosky’s own research is looking at developing climbing robots that use gecko-like mechanisms to stick to surfaces, and also at developing mechanisms that would allow humans to use the same techniques, Spider-Man like, to climb and cling to smooth walls without harnesses or devices that have to be embedded into the wall. Gecko adhesive is a function of the structure of their toes, he explained; the skin on their soles divides into fine, hair-like structures called setae, about 100µm long, which terminate by dividing further into even finer hairs, some 2µm long, which are tipped by flat structures called spatulae.
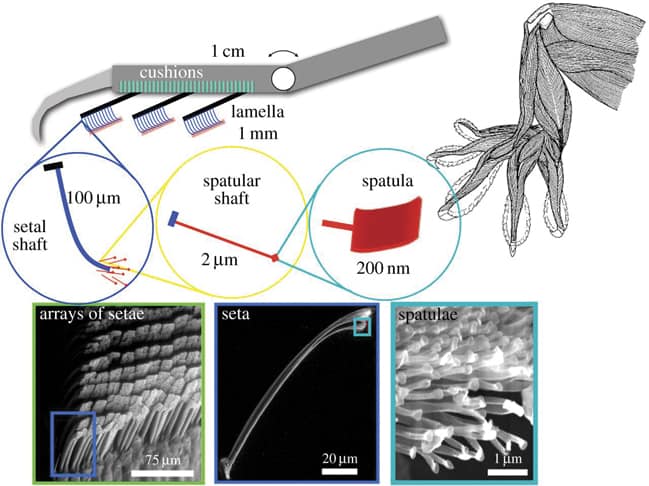
When the gecko presses its foot down, these spatula edges contact the surface; then, as the animal pulls its foot along the surface, the faces of the spatulae are pulled onto the surface. This allows very small forces called van der Waals interactions – the same tenuous forces that hold liquids and vapours together (for example in clouds) – to act. Individually the forces are tiny, but the cumulative effect of the spatulae all over the gecko’s foot is sufficient to hold the whole animal against the surface, even if it is vertical or a ceiling. In fact, it is so strong that a gecko can hang from a single toe.
One key factor is that it is directional, Cutkosky stressed; it only works when a force is applied pulling from the palm of the ‘hand’ towards the tip of the toes. Otherwise, it isn’t sticky at all. “If you touch a gecko’s foot, it doesn’t feel sticky, even if it’s sticking to you at the time,” he said.
Cutkosky’s initial experimental gecko-climbing robot, which went by the name of Stickybot (perhaps not the best name, because as we have seen geckos aren’t actually sticky), had feet whose soles were made from thin wedges of silicone rubber, 20µm wide at the tip and 80µm long. In an ‘unloaded’ state, as these feet touch a surface the tips of the wedges come into contact first; hence they are not sticky. But with a small and increasing shear force, the edges bend over, bringing their flat faces against the surface.
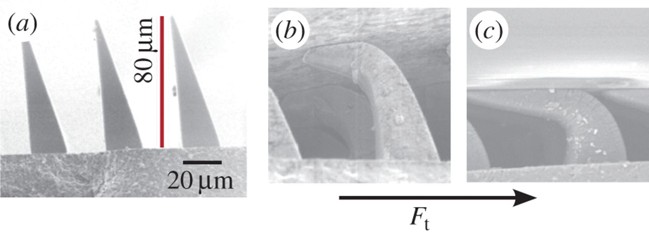
“Thus they represent a greatly simplified analogue to the gecko’s setal stalks and spatulae, which also present a small contact area when unloaded, but flatten out for a much larger contact area when pulled in the preferred direction,” Cutkosky said. “Although the microwedges have a much lower maximum adhesive stress than gecko setae, they are adequate for climbing robots and other applications.”
Incorporating a mechanism like this into robots is fruitful both for engineers and biologists, Cutkosky argued. For engineers, it is the only way to proceed. Agreeing with Whitesides, he noted that we can’t possibly replicate how animals operate; we can only approximate. In fact, he said some biomimicking engineers, such as Prof Bob Full, director of the biomechanics laboratory at Berkeley University, argue that engineers shouldn’t try to copy nature at all, because evolution works on the basis of “what is just good enough” and optimises from there: that is not a good way for engineers to develop technologies. “Because we cannot exactly reproduce complex biological structures, we attempt to identify the most important effects, so we can incorporate them into simplified approximations of what we observe in nature,” Cutkosky said. “We then fabricate robotic mechanisms that embody those principles and test them.” For Stickybot, the team, used a technique called shape deposition manufacturing, which allows them to combine hard and soft polymers with embedded fibres.
“It is at this stage that robotics can provide useful information for biologists as well as engineers, because it is much easier to conduct comprehensive tests on robots than on animals,” he said. “Even geckos and insects sometimes aren’t in the mood to co-operate with inquisitive scientists, and you can’t force a lizard to climb a wall when it doesn’t want to. We then analyse the results and invariably have to refine our hypotheses and robotic implementations, and so the cycle repeats.”
Some of the gecko’s feats are hard for roboticists to copy; for example, they can run down walls as well as up them, but to do this they have to turn their hind feet around so they face in the opposite direction. This influences how roboticists have to think around problems, Cutkosky said. “It is useful to recast the observations regarding the gecko’s directional adhesive structures in terms of robot force and motion planning. For robot control, it is useful to think of constraints and regions of allowable forces in a multi-dimensional force space. The objective is to plan force trajectories for the robot foot, so that contact forces remain in a safe region.”
“Robotics can provide useful information for biologists as well as engineers, because it is much easier to conduct comprehensive tests on robots than on animals. You can’t force a lizard to climb a wall when it doesn’t want to
Mark Cutowsky, University of Berkeley
To give an example of this, he explained that the adhesion force is variable; it depends of how hard the gecko pulls its foot along the wall, and this can also be applied to robot motion. When taking a step up a wall, the gecko [and therefore the robot] has to apply a large shear force for maximum adhesion. When ready to detach its foot at the end of a step, it relaxes the shear force, bringing the combined normal force [pressing the foot into the wall] and shear force [pulling along the wall to seat the spatulae] towards the origin of the plot and allowing it to detach its foot with almost no detachment force. “In practice, adopting this loading and unloading strategy was essential for getting the Stickybot robot to climb smoothly and reliably.”
This is where model building and study come in. If a gecko climbs a wall, intuition might say that it presses equally hard with both sets of feet, or presses harder with the feet that are lower down the wall. This is how humans climb, exerting more force with their legs than their arms to gain height. “But this is precisely the wrong strategy,” Cutkosky said. “Instead, the gecko or robot should pull harder with its front limbs, so that it has more adhesion with which to work.”
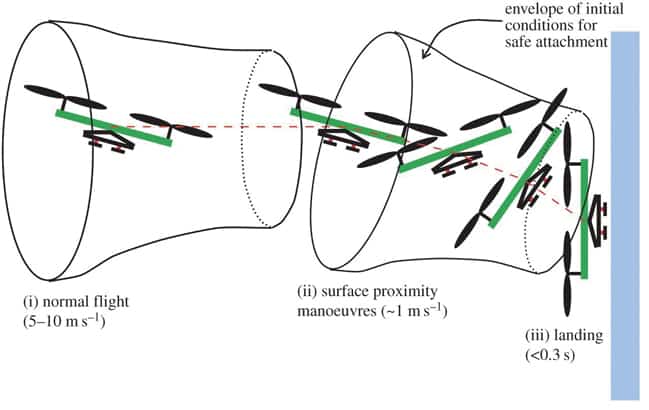
One way this is now being applied has nothing to do with climbing robots at all; instead, it is being used with micro-UAVs (MAVs) so they can perch on vertical walls, windows and ceilings. This gets around an inevitable limitation of micro-vehicles; they are too small to carry enough power to fly for long. Perching means that they can carry out surveillance or sample the atmosphere without needing to expend too much power. But because gecko-mimicking adhesive is directional, the UAV has to land in such a way that it loads its ‘gecko panel’ to create adhesion – that is, initially face on – then dragging its ‘setae’ along slightly to create the van der Waals interaction.
“The vehicle normally flies at speeds of up to 10m/sec and pitches upward to reduce its speed to 1–2m/sec for landing,” said Cutkosky. “This is still rather fast, but is desirable because it makes the MAV much less vulnerable to air currents than a vehicle hovering adjacent to a wall.” The flying philosophy is like flying the MAV through a funnels in space, where at each stage the goal is to get the craft to the mouth of its next funnel. To make it even more complex, the landing sequence has to incorporate enough time for the setae to bend over.
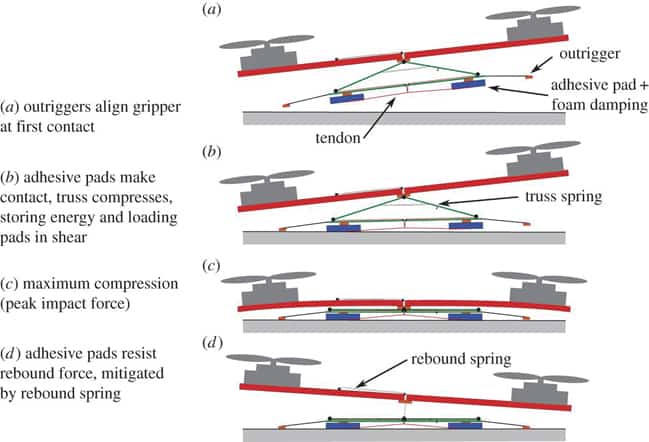
One way to get around this is to design a gripper system with two tiles, each equipped with a gecko-like dry adhesive surface, but arranged so that the adhesive works in the opposite direction: that is, the tiles stick when they are pulled towards each other, and disengages when they are pushed apart. These are linked at the top by a triangular truss made from a spring material, with another linkage acting as a tensioning tendon between the two tiles. As the MAV lands, it collapses the triangular truss and the tensioning tendon pulls the tiles towards each other. To take off, it first has to press into the surface slightly to disengage the adhesive.
There are many differences between natural and engineered gecko adhesives, Cutkosky said – not least the ways the various mechanisms are made. “When making synthetic gecko adhesives, we use bulk manufacturing processes such as lithographic patterning and micro-machining. As we progress from microscopic to macroscopic features, we typically need to employ entirely different processes and machines,” he explained. “New manufacturing and prototyping processes such as micro- machining and shape deposition manufacturing expand our repertoire of materials, dimensional scales and geometries, but do not overcome the limitation that each additional level of hierarchy and complexity is costly.”
Whitesides suggested some more areas where bioinspiration might be fruitful. Cockroaches, for example, might be an even better source of inspiration than geckos, especially in search and rescue; they can manoeuvre over a variety of rough terrain, glide into small spaces and even sprint on two legs.
Energy use is another area where nature may have much to teach us: “A pony-sized hard robot, for example, uses about 100 times more energy than a pony to do fewer functions,” he said. “Why? We do not understand the constraints to efficiency in biological systems in the detail we understand the thermodynamics of work carried out by mechanical, human-made heat engines.”
The way living cells set up energy networks – metabolism – is also beyond us, he added. “These networks are like nothing we can rationally construct. The central element is the ability of individual reactions to ‘talk to one another’ through environmentally sensitive catalysts [especially enzymes]. How do these networks work, and why are they stable?” This question is, Whitesides concluded, really another way of asking: “What is life?”



Nanogenerator consumes CO2 to generate electricity
Nice to see my my views being backed up by no less a figure than Sabine Hossenfelder https://youtu.be/QoJzs4fA4fo