Developed by researchers at Harvard the RoboBee, which is described in a paper in Nature, is powered by soft artificial muscles made using dielectric elastomers, soft materials with good insulating properties, that deform when an electric field is applied.
"There has been a big push in the field of microrobotics to make mobile robots out of soft actuators because they are so resilient," said Yufeng Chen, a postdoctoral fellow at Harvard’s School of Engineering and Applied Science (SEAS). "However, many people in the field have been skeptical that they could be used for flying robots because the power density of those actuators simply hasn't been high enough and they are notoriously difficult to control. Our actuator has high enough power density and controllability to achieve hovering flight."
Take a break: RoboBee saves energy with ability to perch
New Harvard RoboBee jumps from aquatic to aerial
By improving the electrode conductivity, the researchers were able to operate the actuator at 500Hz, on par with the rigid actuators used previously in similar robots.
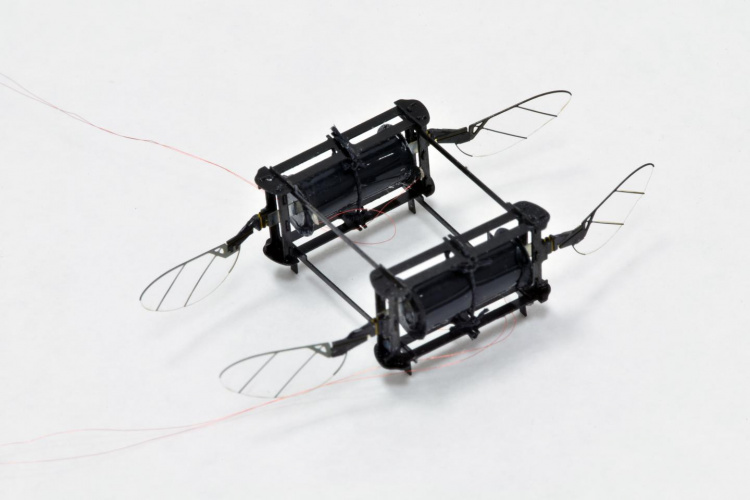
To demonstrate various flight capabilities, the researchers built several different models of the soft-powered RoboBee. A two-wing model could takeoff from the ground but had no additional control. A four-wing, two actuator model could fly in a cluttered environment, overcoming multiple collisions in a single flight. Meanwhile, an eight-wing, four-actuator model demonstrated controlled hovering flight, the first for a soft-powered flying microrobot.
Elizabeth Farrell Helbling, a former graduate student at SEAS and a coauthor on the paper said that the technology holds promise for a range of applications.
"One advantage of small-scale, low-mass robots is their resilience to external impacts. The soft actuator provides an additional benefit because it can absorb impact better than traditional actuation strategies. This would come in handy in potential applications such as flying through rubble for search and rescue missions. "
Commenting on future plans for the technology Robert Wood, Charles River Professor of Engineering and Applied Sciences in SEAS said: "Soft actuators with muscle-like properties and electrical activation represent a grand challenge in robotics. If we could engineer high performance artificial muscles, the sky is the limit for what robots we could build."



About:Energy tasked with McMurtry battery challenge
Zero reason to own an EV that has blistering performance if it can't travel more than a few miles before needing a recharge. I saw the McMurty EV run...