The researchers at Leeds University explored a decision-making model called drift diffusion to determine whether it could predict when pedestrians would cross a road in front of approaching cars, and whether it could be used in scenarios where the car gives way to the pedestrian with or without explicit signals.
This prediction capability could help autonomous vehicles to communicate more effectively with pedestrians, the team believes, in terms of their movements in traffic and any external signals such as flashing lights.
Drift diffusion models assume that people reach decisions after accumulation of sensory evidence up to a threshold at which the decision is made.
“When making the decision to cross, pedestrians seem to be adding up lots of different sources of evidence, not only relating to the vehicle’s distance and speed but also using communicative cues from the vehicle in terms of deceleration and headlight flashes,” said the study's senior author Professor Gustav Markkula, from Leeds University’s Institute for Transport Studies.
Bad weather dataset could aid autonomous vehicles
“When a vehicle is giving way, pedestrians will often feel quite uncertain about whether the car is actually yielding, and will often end up waiting until the car has almost come to a full stop before starting to cross. Our model clearly shows this state of uncertainty borne out, meaning it can be used to help design how automated vehicles behave around pedestrians in order to limit uncertainty, which in turn can improve both traffic safety and traffic flow.”
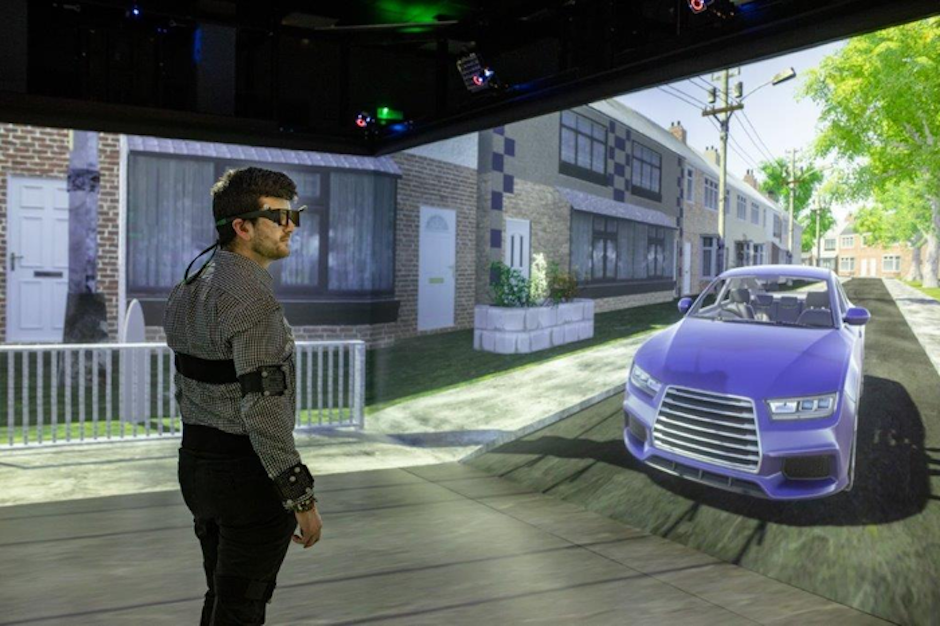
According to the study, the team used virtual reality to place trial participants in different road-crossing scenarios in the university’s HIKER (Highly Immersive Kinematic Experimental Research) pedestrian simulator.
Participants’ movements were tracked in high detail while walking freely inside a stereoscopic 3D virtual scene, showing a road with oncoming vehicles. Their task was to cross the road as soon as they felt safe to do so.
Different scenarios were tested, with the approaching vehicle either maintaining the same speed or decelerating to let the pedestrian cross, sometimes also flashing the headlights — a commonly used signal for yielding intentions in the UK.
As predicted by their drift diffusion model, the researchers found that participants behaved as if they were deciding on when to cross by adding up, over time, the sensory data from vehicle distance, speed, acceleration and communicative cues.
Markkula said that the findings could be key to enabling the challenge of safe and human-acceptable interaction with pedestrians for developers of autonomous vehicles.



IEA report claims batteries are ‘changing the game’
The weight and bulk of static batteries, even domestic units, is immaterial. The IEA's trilemma is illustrated here:-...