Motors drive vision of galaxies far, far away
Thousands of actuator motors and sensors will enable the European Extremely Large Telescope to focus light generated light years away into a clear visual image.
“And the Lord said let there be light.” The famous words from Genesis may have passed the lips of engineers, scientists and businessmen in December 2014, when the Council of the European Space Organisation ESO approved the construction of the European Extremely Large Telescope, or E-ELT. The green light on the two-phase build opened up the market for components required to build this enormous, pan-European project, valued Euro1.083bn at 2012 prices.
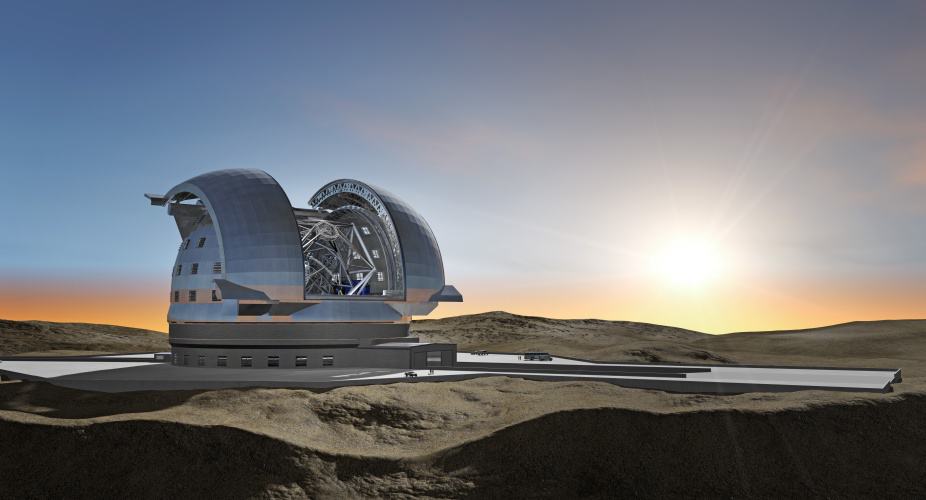
Located in Cerro Armazones, deep in Chile’s Atacama Desert, the telescope’s scientific purpose is to search for exoplanets – planets outside our known universe – and the stellar composition of nearby galaxies.
An extremely large telescope needs extremely accurate moving parts. E-ELT’s five mirrors must align precisely to steer the beam toward a Nasmyth focal surface, where the final visible image is produced. The E-ELT will gather more light than all of the existing 8-10 metre class telescopes in the world combined, and 100 million times more light than the human eye.
Register now to continue reading
Thanks for visiting The Engineer. You’ve now reached your monthly limit of premium content. Register for free to unlock unlimited access to all of our premium content, as well as the latest technology news, industry opinion and special reports.
Benefits of registering
-
In-depth insights and coverage of key emerging trends
-
Unrestricted access to special reports throughout the year
-
Daily technology news delivered straight to your inbox



Water Sector Talent Exodus Could Cripple The Sector
Maybe if things are essential for the running of a country and we want to pay a fair price we should be running these utilities on a not for profit...