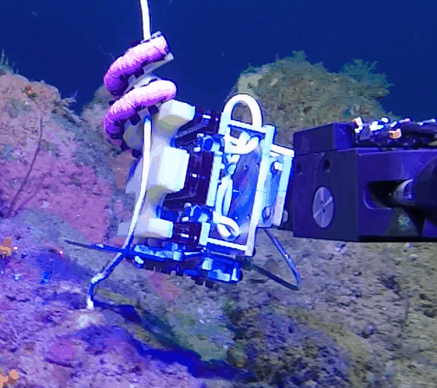
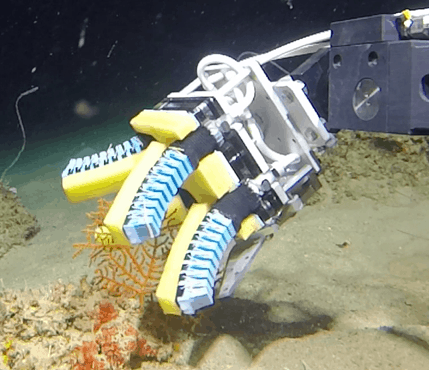
Submersibles are often equipped with robotic arms for exploring the underwater world, but they tend to be rigid and unsuited for interacting with delicate marine life. The new device, built by engineers at Harvard, Baruch College, and the University of Rhode Island (URI), uses a modular system consisting of bending, twisting and soft robotic grabbing units to gently manipulate underwater creatures.
"This new soft robotic arm replaces the hard, rigid arms that come standard on most submersibles, enabling our soft robotic grippers to reach and interact with sea life with much greater ease across a variety of environments and allowing us to explore parts of the ocean that are currently understudied," said first author Brennan Phillips, formerly of Harvard’s Wyss Institute for Biologically Inspired Engineering and now an Assistant Professor at URI.
A custom seawater-based hydraulic engine drives the device, requiring just 50 watts of power. According to the team, this is less than half the power of the smallest commercially available deep-sea electronic manipulator arm. The device can be controlled wirelessly using a glove with embedded soft sensors that translates the wearer’s movements into robotic motion. During deep-sea testing off the coast of Brazil, the system successfully interacted with organisms including a glass sponge, a sea cucumber, a branching coral, and free-floating bioluminescent tunicates.
The paper describing the work states that the arm has been tested to a depth of 2,300m. This takes it well beyond the capabilities of SCUBA, which facilitates much of today’s ‘hands-on’ marine biology. The researchers hope that the soft robotic arm could be a key component in new underwater laboratories that allow science to be conducted in-situ, without removing creatures from their natural environments. The team is even hoping to incorporate non-invasive DNA and RNA sampling capabilities into the actuating units of the grabber.
"This low-power, glove-controlled soft robot was designed with the future marine biologist in mind, who will be able to conduct science well beyond the limits of SCUBA and with a comparable or better means than via a human diver," said the Wyss Institute’s Robert Wood, a senior author of the paper and the Charles River Professor of Engineering and Applied Sciences at SEAS.



Nanogenerator consumes CO2 to generate electricity
Nice to see my my views being backed up by no less a figure than Sabine Hossenfelder https://youtu.be/QoJzs4fA4fo