
Moving fragile objects is a major issue for many industries, notably food and drink. Natural objects like fruits and vegetables have unique and unpredictable shapes and sizes, and often must not be damaged as they are moved around. This makes packing and handling difficult to automate, and necessitates human involvement, which pushes up producer costs and therefore increases prices.
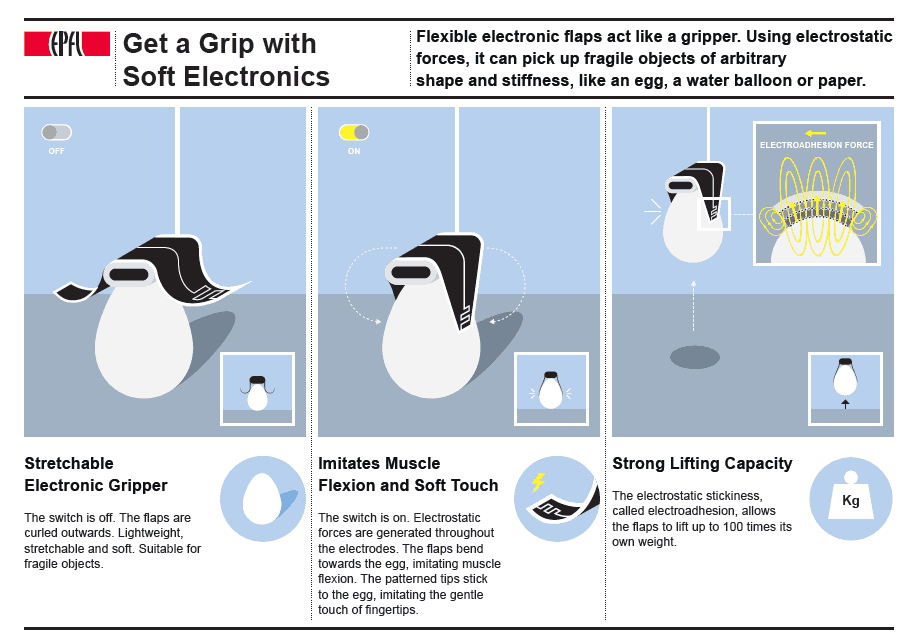
Soft robotics – making robotic manipulators out of plastics and gels – is a promising avenue for development of automated equipment which can handle this problem. Generally soft robots mimic some aspect of human physiology to gently grip and move items while conforming to their shape, exerting enough force to take the item’s weight without damaging it. At the Ecole Polytechnique Fedéral de Lausanne (EPFL), researchers have developed a soft robotic gripper that uses electrostatic forces to pick up objects of arbitrary shape and stiffness, such as eggs, water-filled balloons of pieces of paper.
The robot’s fingers are flaplike and consist of five layers: a pre-stretched elastomer sandwiched between two layers of a flexible electrode; this whole assembly is also sandwiched between two layers of silicone of differing thicknesses. With no current running through the electrode layers, the differing thicknesses of the silicone make the flaps bend outwards; when switched on, the electrodes first straighten and then bend inwards, mimicking the action of muscles. The tips of the electrodes have an interdigitated pattern, resembling interlaced fingers; this is designed to maximise electrostatic attraction; the effect that makes a balloon stick to a wall when it’s been rubbed on hair or clothing. The force this generates can lift 80 times the weight of the electrodes, the team claims in a paper in Nature Materials.
Other soft grippers have used pneumatics to exert a grasping force, which can be too strong for fragile items. Others need to be programmed for the specific shape of the object they are to hold; whereas the Lausanne team’s grippers conform to any shape with no need for customisation or adjustment, they can also handle deformable and flat items, both of which have been problematic for previous systems.
"This is the first time that electroadhesion and soft robotics have been combined together to grasp objects," says Jun Shintake, doctoral student at EPFL and first author of the paper.
“The novelty of our soft gripper is the ideal combination of two technologies: artificial muscles and electroadhesion,” says PhD co-supervisor Dario Floreano of EPFL. "Our unique configuration of electrodes and silicone membranes is what allows us to control the bending of the flaps and the electrostatic grip," added PhD co-supervisor Herbert Shea of EPFL.
As well as food, the team thinks the system could be used to grasp debris in space or used in prosthetic hands.



Glasgow trial explores AR cues for autonomous road safety
They've ploughed into a few vulnerable road users in the past. Making that less likely will make it spectacularly easy to stop the traffic for...