Brain-mimicking ‘neuromorphic’ computer chips for robot insects
Engineers from Cornell University are developing a type of low-energy computing for robot insects that mimics how the brain functions.
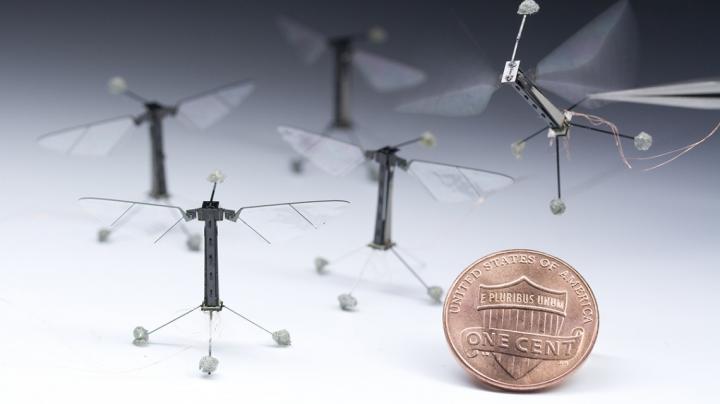
Cornell engineers are developing new programming that will make RoboBees more autonomous and adaptable to complex environments (Credit: Harvard Microrobotics Lab)
Instead of binary code, neuromorphic chips process spikes and combinations of electrical current, in a similar way to how neurons fire in the brain. ‘Event-based’ sensing and control algorithms created by the researchers would allow robot insects to react to the unpredictable scenarios that play out all the time in the real world. And as they require significantly less power than traditional processors, more computation can be packed into smaller payloads.
The Cornell team is working with the Harvard Microrobotics Laboratory, creators of the RoboBee microrobot. Currently, RoboBee remains tethered to a power source while operating, but the team behind it is looking to remove that constraint. According to the Cornell engineers, its neuromorphic algorithms could help make RoboBee more autonomous and adaptable to complex environments, with little additional weight.
Register now to continue reading
Thanks for visiting The Engineer. You’ve now reached your monthly limit of news stories. Register for free to unlock unlimited access to all of our news coverage, as well as premium content including opinion, in-depth features and special reports.
Benefits of registering
-
In-depth insights and coverage of key emerging trends
-
Unrestricted access to special reports throughout the year
-
Daily technology news delivered straight to your inbox



BEAS funding available to help businesses cut energy costs
And not a moment too soon, if the following exchange broadcast last Friday 13th June, on the Radio 4 ´Rare Earth´ program (link below, ~ 17 minutes...