Described in Advanced Materials Technologies, the technique refines an emerging 3D printing technology known as digital light processing (DLP). The researchers, drawn from the Singapore University of Technology and Design (SUTD), and China’s Southern University of Science and Technology (SUSTech) and Zhejiang University (ZJU), designed a process for guiding DLP to print pneumatic actuators for soft robots with a size of 2-15mm. Individual features on the actuators were as small as 150μm. According to the team, the breakthrough could have applications ranging from jet aircraft maintenance to keyhole surgery.
Lightweight pump makes push for soft robots
Soft robots controlled by light and magnetic field
"We leveraged the high efficiency and resolution of DLP 3D printing to fabricate miniature soft robotic actuators," said lead researcher Associate Professor Qi (Kevin) Ge from SUSTech.
"To ensure reliable printing fidelity and mechanical performance in the printed products, we introduced a new paradigm for systematic and efficient tailoring of the material formulation and key processing parameters."
In DLP 3D printing, photo-absorbers are usually added to polymer solutions to enhance the printing resolution. However, this can adversely affect the elasticity of the finished product, something that’s vital for soft robots. To achieve the desired trade-off between resolution and elasticity, the team used a photo-absorber with good absorbance at the wavelength of the projected UV light, then used mechanical tests to gauge elasticity under deformation. Variations in curing time and depth were also explored to reach the desired outcome.
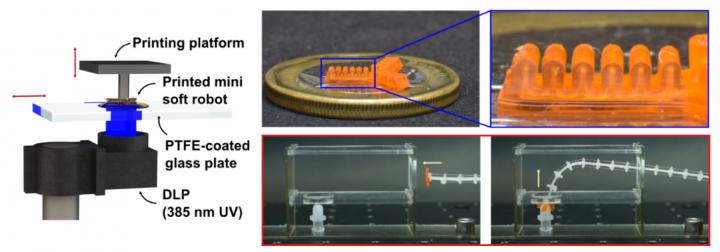
"By following this process flow, we are able to produce an assortment of miniature soft pneumatic robotic actuators with various structures and morphing modes, all smaller than a one Singapore Dollar coin, on a self-built multi-material 3D printing system,” said Professor Qi.
“The same methodology should be compatible with commercial stereolithography (SLA) or DLP 3D printers as no hardware modification is required."



Hard hat mounted air curtain adds layer of protection
Something similar was used by miners decades ago!