Electric powertrains are rewriting the rulebook when it comes to vehicle design. What may look like a simple question of packaging a new set of running gear into a century-old template soon becomes a fundamental rethink when you get down to the details. From the structural design and suspension layout through to connected car applications for energy management, everything is changing.

The stakes are high in such a disruptive environment. Manufacturers that get it right can redefine their brand for the new electric era, whereas others risk going down hugely expensive blind alleys. And with the pressure on to transform quickly, there’s little time to explore different options using conventional techniques.
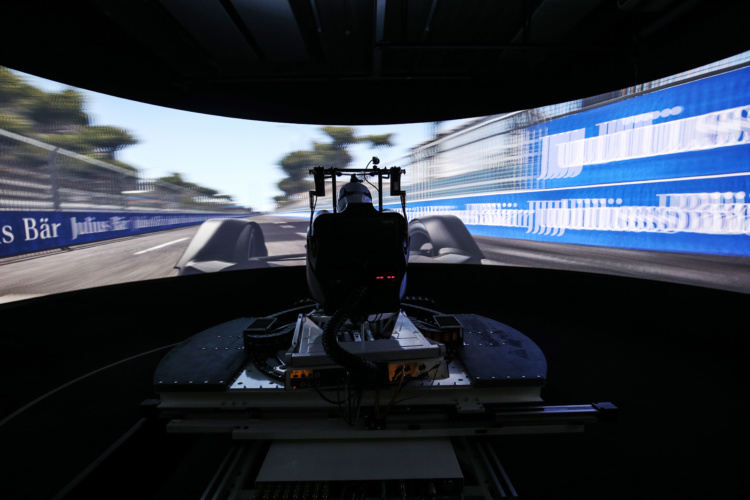
Nestled in a Norfolk industrial estate, just over the hedge from the home of Lotus Cars, sits a company that’s helping manufacturers to confront these challenges. Ansible Motion has a background in motorsport, but these days it supplies driver in the loop (DiL) simulators to some of the world’s biggest carmakers including Ford, General Motors and BMW.
Company founder Kia Cammaerts’ previous work included writing offline simulations for motorsport teams. These mathematically modelled the behaviour of the car to predict its lap time for a given set of vehicle parameters or weather conditions.
As the sophistication of the models increased so did the accuracy of the results. But after a while, refining the vehicle model no longer seemed to yield the same improvements. Thereason, Cammaerts realised, was that the biggest factor had become the driver and the way that their inputs changed in response to the vehicle’s behaviour. Ansible Motion’s DiL simulators are designed to close this loop by connecting a human driver to the virtual world.
The human touch is just as important when it comes to production cars. In fact, arguably more so, when you’re dealing with vehicles designed for the vast and unpredictable world of the open road, Cammaerts points out.
“The connection between a car and its driver is a feedback loop,” he comments. “If you’re on a rollercoaster ride at a theme park, you can scream all you like it’s not going to slow down; but if you’re driving a car and you’re not comfortable with what it’s doing you’re going to react to that and change your inputs.”
Subtle changes
The aim of a DiL simulator is to capture the subtleties of this human experience in a controllable and repeatable environment. That’s a useful tool for any vehicle development, but it can be particularly important in a clean sheet exercise such as creating a manufacturer’s first dedicated electric vehicle (EV) platform.
“A lot of the early EVs were existing platforms that had been repackaged for an electric powertrain, but it soon became obvious that you lost out on a lot of opportunities if you did that rather than designing an electric vehicle from the ground up,” comments Cammaerts. “The obvious example is the very low centre of gravity that a bespoke EV platform can achieve. That means your approach to the suspension design is entirely different to a conventional powertrain.”
A simple example could be whether to go with a trailing arm rear suspension setup to maximise room for the battery or a more sophisticated multi-link system that could improve the ride and handling. In an ideal world you might build physical prototypes of both, but the time and cost involved in doing so would be eyewatering – particularly if you’re dealing with an entirely new platform where there are no similar vehicles in the existing line up to adapt as test mules.
“When you’re facing these sorts of decisions, the best thing you can do is to put a real human in contact with your virtual model at the earliest possible stage of development,” comments Cammaerts. “It’s the only way that you can capture that human experience before you actually have the vehicle in the flesh.”

Even the most experienced vehicle manufacturers can get caught out. There’s a story of Dave Pericak, then global director of Ford’s performance division, being invited to drive the new electric Mustang Mach-E for the first time on the simulator.
“I flew down to North Carolina where we have the simulator and I said, this is supposed to be a Mustang it better drive like one,” Pericak recalls in a Ford video. “When I got out of the simulator the entire team was looking at me, and I said ‘it’s not a Mustang.’ You could almost feel the air leave the room.”
Based on this feedback from the simulator, the Ford team went back to the drawing board, and created a car that not only won Pericak’s approval, but propelled this staunchly traditional brand to the forefront of the EV arms race. In EV-obsessed Norway, for instance, the Mustang Mach-E was the best-selling car outright in the latest figures, beating the likes of the Tesla Model 3 and the Volkswagen ID.4.
Brand differentiation
As more EVs reach the mainstream, simply offering an electric powertrain and reasonable battery range is no longer enough. Manufacturers are having to work increasingly hard to differentiate their electric offerings from the competition. And this can come from the little details as well as the bigger picture.
“The start of an EV programme might present some very fundamental dilemmas like whether to go for a single motor [two-wheel drive] or twin motor [four-wheel drive] configuration, which can have a major impact on the handling and performance,” comments Cammaerts. “But you’ve also got quite nuanced attributes like pull away. I’ve started to read reviews of production vehicles that differentiate them on their pull away characteristics and actually make inferences about aspects of the cars’ performance, their intent and their capabilities based on those initial impressions.”
You have to put real humans in contact with real vehicle dynamic behaviour
Much of this comes down to software calibration, which can still be tweaked in the later stages of the programme using physical prototypes. But virtual testing allows engineers to begin this process far earlier on – and with models of the production-intent hardware rather than early prototypes. On occasions, it will also hinge on more fundamental hardware choices that can only be made at the beginning of the programme. A fully dynamic DiL simulator gives the opportunity to explore these options with representative motion cueing and realistic responses.
Qualitative impressions of these attributes can be key when it comes to building what manufacturers refer to as ‘brand feel’. But, as Cammaerts’ rollercoaster analogy illustrates, they also have a direct impact on the vehicle’s real-world performance.
“Battery range still drives the purchase decision for a significant number of potential EV owners,” he comments. “Pedal sensitivity and the regenerative braking effect when you lift-off or move over to the brakes has a strong part to play in achievable range. We’ve had contact with one vehicle that had a knob on the dash to control the level of regen, and at maximum regen it’d decelerate at about 1g, which seemed insane, but that’s the sort of thing that you can explore when you’re carrying out testing.”
Some vehicles also feature eco modes that typically alter the pedal response to more economical driving and reduce the power going to auxiliaries such as the air conditioning system. But there’s something of a knack to reducing these energy drains without adversely impacting the driving experience, Cammaerts notes: “All these solutions will prompt slightly different behaviour in the human driver. And you can’t predict that with any sort of offline study, because you need a real human to be to be provoked into those responses.”
In the future, he predicts, vehicles will become far more adaptable, modifying their behaviour more subtly and communicating more effectively with the driver: “We’ve already got cars that will plan your journey and tell you where you’ll need to stop and recharge or how much range you’ll have when you reach your destination. But those functions are of limited use at the moment, because you can’t always trust the information. This data needs to be communicated in real time and the car needs to be adaptive. It needs to know if the charging station you’re planning to use is out of operation; it needs to understand that there’s cold weather coming or that there’s a big traffic jam up ahead so it’ll be stationary with the heater running.”
Predicting the vehicle’s true energy consumption and communicating that to the driver in a relatable way are important steps in mitigating range anxiety. DiL simulators provide a controllable and repeatable environment in which to develop range estimation models using real human inputs, Cammaerts points out. They can also be a handy tool for carrying out driver distraction studies and user interface development when it comes to evaluating ways of communicating this information.
A lot of these tasks have parallels in traditional combustion engined vehicle development, but few are directly comparable. The result is a scramble for new ideas, which can be exciting and risky in equal measure.
“There are so many opportunities with the shift towards EVs,” Cammaerts concludes. “Simulation can be a huge benefit when you’re trying to steer your development through these large, complex solution spaces. To do that effectively you have to put real humans in contact with real vehicle dynamic behaviour. And the only way to do that before you’ve got a vehicle is through driver in the loop simulation.”



Poll: Should the UK’s railways be renationalised?
I'm reminded of the old adage about stupidity is doing the same thing time and time again, expecting different results. The current model simply...